plc如何控制伺服电机.doc
版权申诉
174 浏览量
2022-06-22
10:01:15
上传
评论
收藏 119KB DOC 举报

PLC 如何控制伺服电机
以松下 MinasA4 系列伺服驱动器为例,介绍 PLC 控制伺服电机的方法。伺服电机有三种控制模式:速度控制,位置
控制,转矩控制{由伺服电机驱动器的 Pr02 参数与 32(C-MODE)端子状态选择},本章简要介绍位置模式的控制方法。
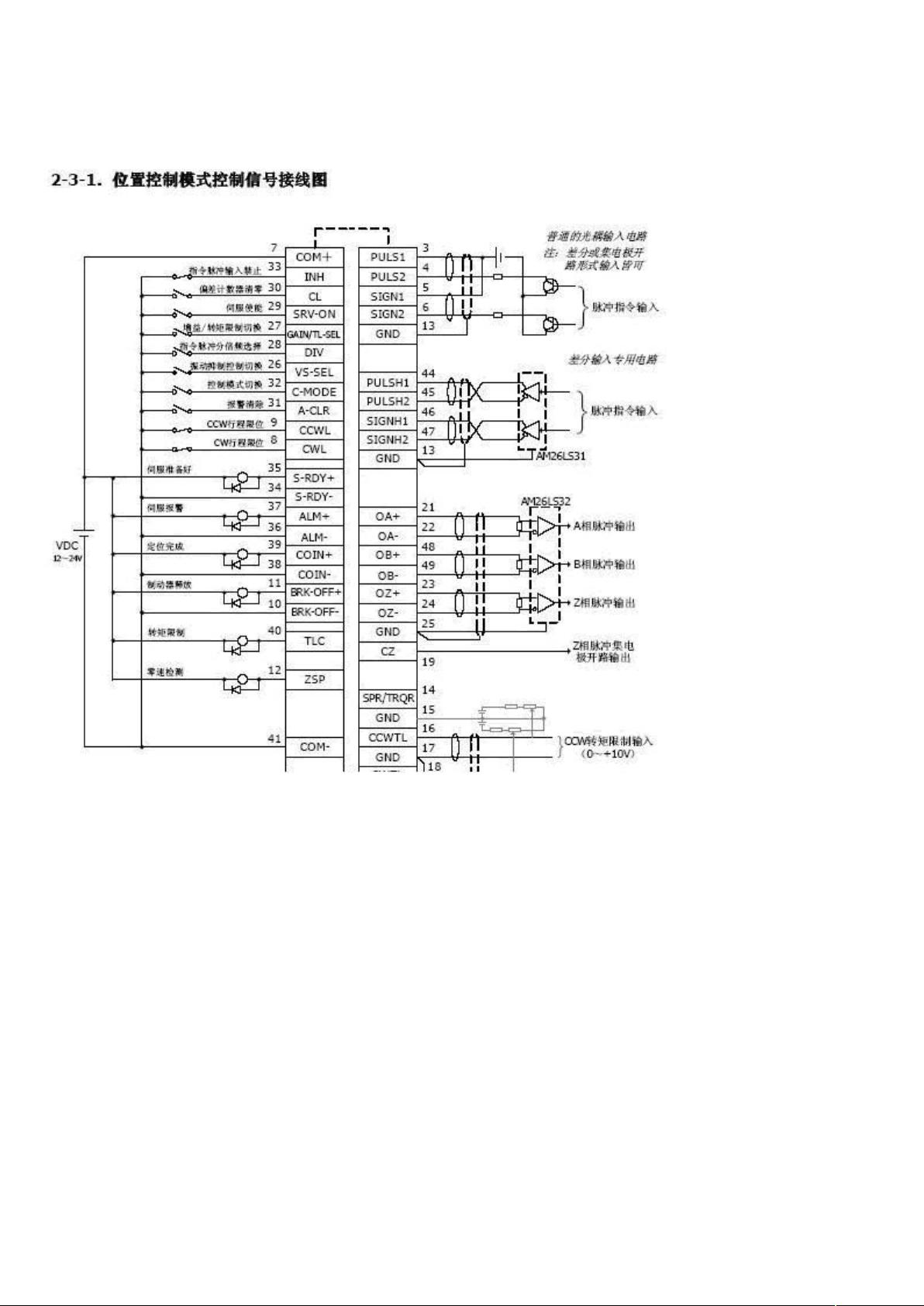
一、按照伺服电机驱动器说明书上的"位置控制模式控制信号接线图"连接导线
3(PULS1),4(PULS2)为脉冲信号端子,PULS1 连接直流电源正极(24V 电源需串连 2K 左右的电阻),PULS2 连接控制
器(如 PLC 的输出端子)。
5(SIGN1),6(SIGN2)为控制方向信号端子,SIGN1 连接直流电源正极(24V 电源需串连 2K 左右的电阻),SIGN2 连接
控制器(如 PLC 的输出端子)。当此端子接收信号变化时,伺服电机的运转方向改变。实际运转方向由伺服电机驱动器
的 P41,P42 这两个参数控制。
7(com+)与外接 24V 直流电源的正极相连。
29(SRV-0N),伺服使能信号,此端子与外接 24V 直流电源的负极相连,则伺服电机进入使能状态,通俗地讲就是伺
服电机已经准备好,接收脉冲即可以运转。
上面所述的六根线连接完毕(电源、编码器、电机线当然不能忘),伺服电机即可根据控制器发出的脉冲与方向信号
运转。其他的信号端子,如伺服报警、偏差计数清零、定位完成等可根据您的要求接入控制器。构成更完善的控制系
统。
二、设置伺服电机驱动器的参数。
1、Pr02----控制模式选择,设定 Pr02 参数为 0 或是 3 或是 4。3 与 4 的区别在于当 32(C-MODE)端子为短路时,控制
模式相应变为速度模式或是转矩模式,而设为 0,则只为位置控制模式。如果您只要求位置控制的话,Pr02 设定为 0
或是 3 或是 4 是一样的。
2、Pr10,Pr11,Pr12----增益与积分调整,在运行中根据伺服电机的运行情况相应调整,达到伺服电机运行平稳。当然
其他的参数也需要调整(Pr13,Pr14,Pr15,Pr16,Pr20 也是很重要的参数),在您不太熟悉前只调整这三个参数也可以满
足基本的要求.
3 、 Pr40---- 指 令 脉 冲 输 入 选 择 , 默 认 为 光 耦 输 入 ( 设 为 0) 即 可 。 也 就 是 选 择
资源评论


智慧安全方案
- 粉丝: 3652
- 资源: 59万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP











