基于单片机的电动车控制器.doc
版权申诉
61 浏览量
2022-06-03
23:24:12
上传
评论
收藏 179KB DOC 举报


基于单片机的电动车控制器
摘要:本设计介绍了一种以单片机 89c51 为主控芯片的电动自行车调速控制系统和测速系统的设计方案 给出
了系统的硬件构成和软件设计方法。实验证明:该系统性能可靠、成本较低,是一种实用的直流电动机调速系
统。
关键词:89c51、直流电机、pwm 调速、霍尔传感器
1 引言
当前,随着保护环境、节约能源的呼声日益高涨 无污染、能源可多样化配置的新型交通工
具引起了人们的普遍关注,同时也得到了极大的发展,电动自行车便是其中之一1。它以蓄电
池发出的电能作为驱动能源,以电动机作动力,具有无废气污染、“零排放”、无噪音、轻便美观
等特点 特别适合在人口较集中的大中城市中使用。但目前市场上的电动自行车还存在着一些不
够完善的地方,尤其是电机控制方面有待于进一步提高。电动车控制器是用来控制电动车电机
的启动、运行、进退、速度、停止以及电动车的其它电子器件的核心控制器件,它就象是电
动车的大脑,是电动车上重要的部件。本设计根据无刷直流电机的原理,利用美国Atmel
公司推出的一款 89c51 单片机作为主控芯片设计了一种无刷直流电机调速控制系统,该系统具
有硬件结构简单、软件设计灵活、适用面广、价格低廉等优点 具有一定的实用价值 。具有超静
音设计技术:独特的电流控制算法,能适用于任何一款无刷电动车电机,并且具有相当的控
制效果,提高了电动车控制器的普遍适应性,使电动车电机和控制器不再需要匹配。自动识
别电动车电机的换向角度、霍尔相位和电机输出相位,只要控制器的电源线、转把线和刹车
线不接错,就能自动识别电机的输入几输出模式,可以省去无刷电动车电机接线的麻烦,大
大降低了电动车控制器的使用要求。
2 总体设计方案
2.1 设计思路
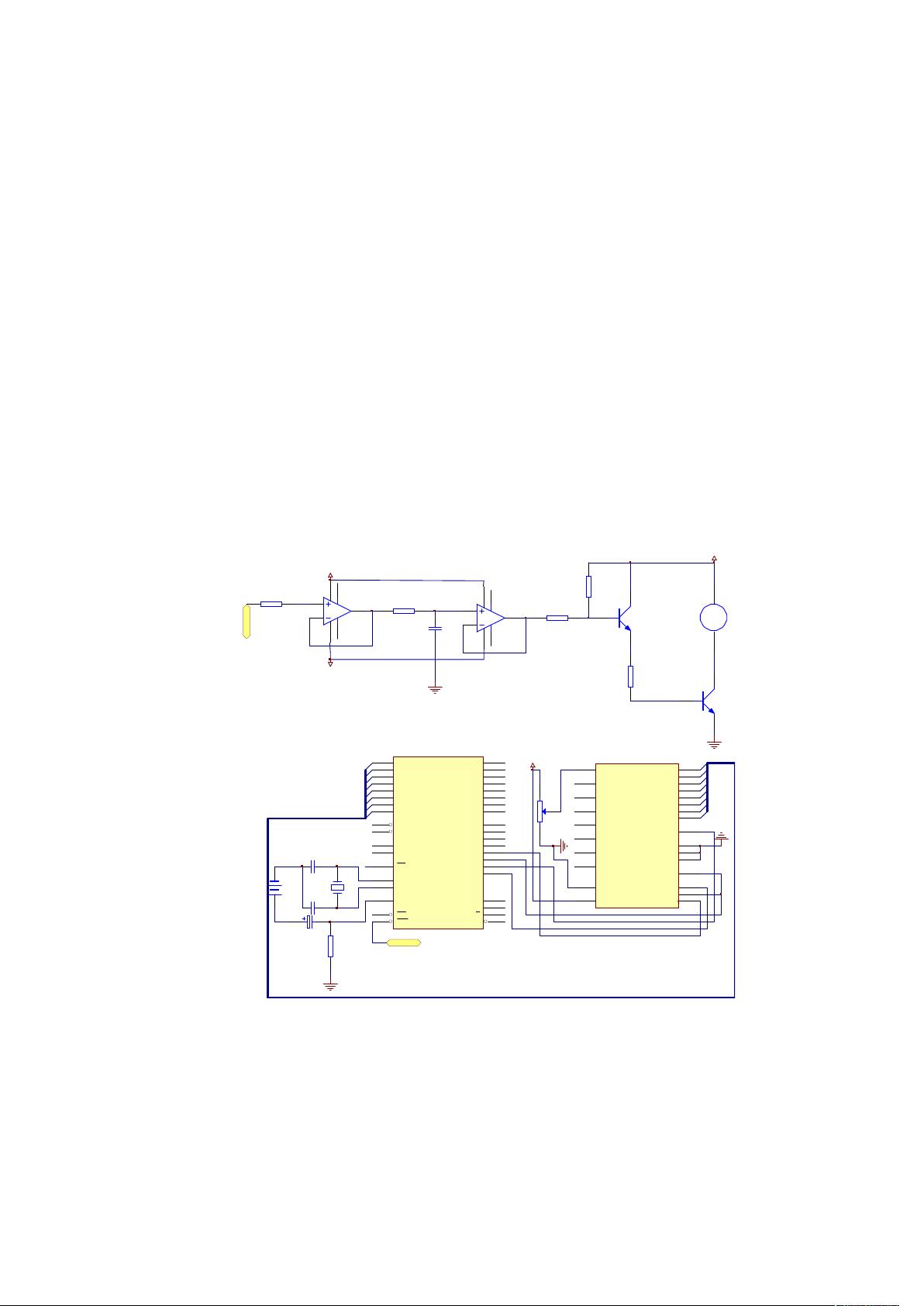
电动车控制器,其主要的功能是能线性调节车速,最终还是直流电机调速问题,本设计采
用脉宽调制(PWMM)配以单片机为中心控制元件的调速系统。利用霍尔线性传感器实现传统的
车把调速,把电压信号通过模数转换后送入单片机 IO 口,控制占空比,再经过信号放大控制电
机转速。速度显示利用开关型霍尔传感器采集两高点评的时间计算速度,通过串行口输出显示。
2.1.1 方案确立
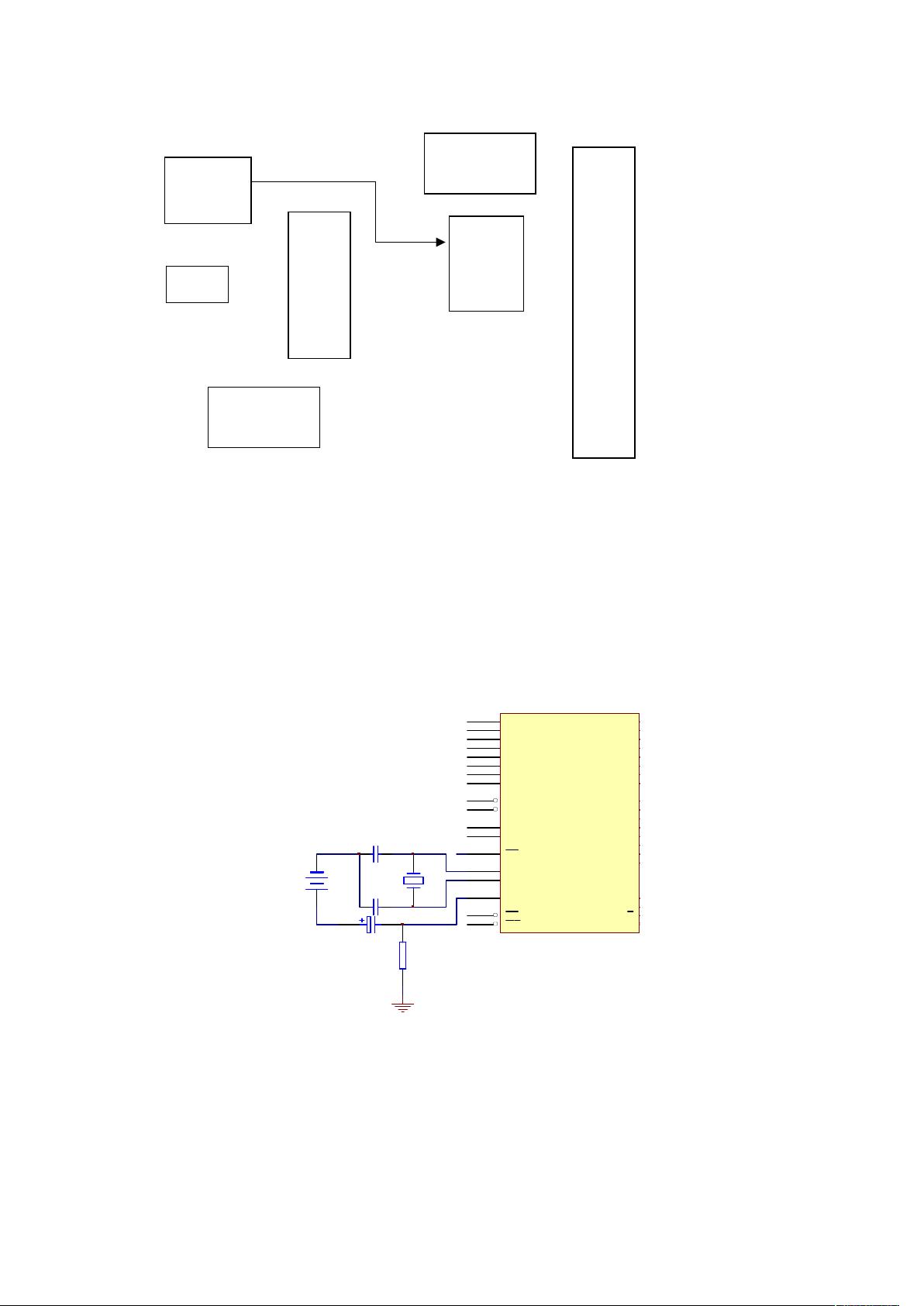
整个系统主要包括车轮霍尔开关器件检测电路及测速电路、调速电路、低压、过载、过流
保护电路和稳压电路。单片机小系统电是基础,模数转换以 ADC0809 为核心,显示电路采用
74ls164 和七段共阳数码管静态显示,稳压电路采用 7805 芯片给单片机以及显示和模数转换
单元供电。
2.2 设计方框图
1
剩余14页未读,继续阅读
资源评论


智慧安全方案
- 粉丝: 3652
- 资源: 59万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP











