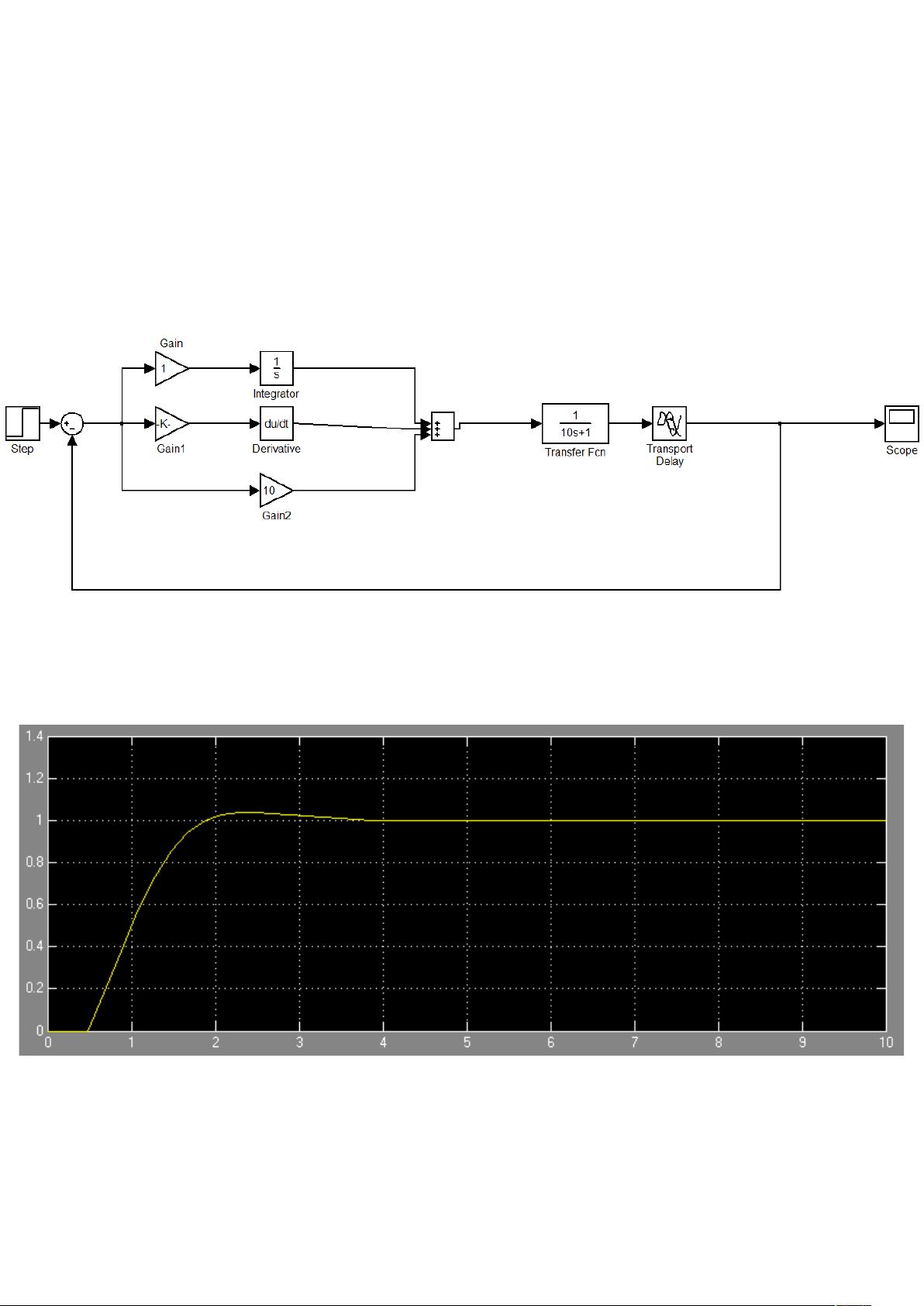
基于 Simulink 的模糊控制仿真 在本文档中,我们将基于 Simulink 平台设计和仿真两种控制器:常规的 PID 控制器和模糊控制器,并比较它们的效果。同时,我们还将探究当模糊控制器的比例因子发生变化时,系统响应的变化。 一、基于 Simulink 的 PID 控制器的仿真及其调试 PID 控制器是一种常用的控制算法,通过调整三个参数 Kp、Ki 和 Kd 可以实现系统的控制。对于给定的系统传递函数为 1/(10s+1)*e(-0.5s),我们可以设计出一个 PID 控制器,并通过 Simulink 仿真平台对其进行调试。该控制器的参数分别为 Kp=10、Ki=1、Kd=0.05。通过仿真可以看到,PID 控制器可以很好地控制系统的输出。 二、基于 Simulink 的模糊控制器的仿真及其调试 模糊控制器是一种基于模糊逻辑的控制算法,通过模糊推理可以实现系统的控制。在本文档中,我们将设计一个双输入单输出的模糊控制器,输入变量为偏差 E 和偏差变化量 EC,输出变量为控制量 U。我们使用 Mamdani 控制规则和三角形隶属度函数来设计模糊控制器。通过 Simulink 仿真平台,可以看到模糊控制器的控制效果。 三、实验心得 通过比较 PID 控制器和模糊控制器,我们可以看到,两种控制器的输出波形并没有太大的区别。但是,对于给出精确数学模型的控制对象,PID 控制器显得更具有优势,其一是操作简单,其二是调节三个参数可以达到满意的效果。模糊控制器虽然可以实现系统的控制,但是操作繁琐,调节参数的难度并不亚于 PID 控制器。 四、模糊控制器的比例因子对系统响应的影响 通过实验,我们可以看到,模糊控制器的比例因子 Ku 对系统响应的速度有很大的影响。当 Ku 增大时,系统响应速度加快,但 Ku 过大将会导致系统输出上升速率过快,从而使系统产生较大的超调量乃至发生振荡。反之,当 Ku 过小时,系统输出上升速率变小,将导致系统稳态精度变差。因此,在设计模糊控制器时,需要合理地选择比例因子 Ku。 本文档展示了基于 Simulink 平台的 PID 控制器和模糊控制器的设计和仿真,以及对比两种控制器的效果。同时,我们还探究了模糊控制器的比例因子对系统响应的影响。这些内容对于控制系统的设计和优化具有重要的参考价值。
本内容试读结束,登录后可阅读更多
下载后可阅读完整内容,剩余6页未读,立即下载











评论0
最新资源