

. -
直流电动机调速系统模糊控制的仿真
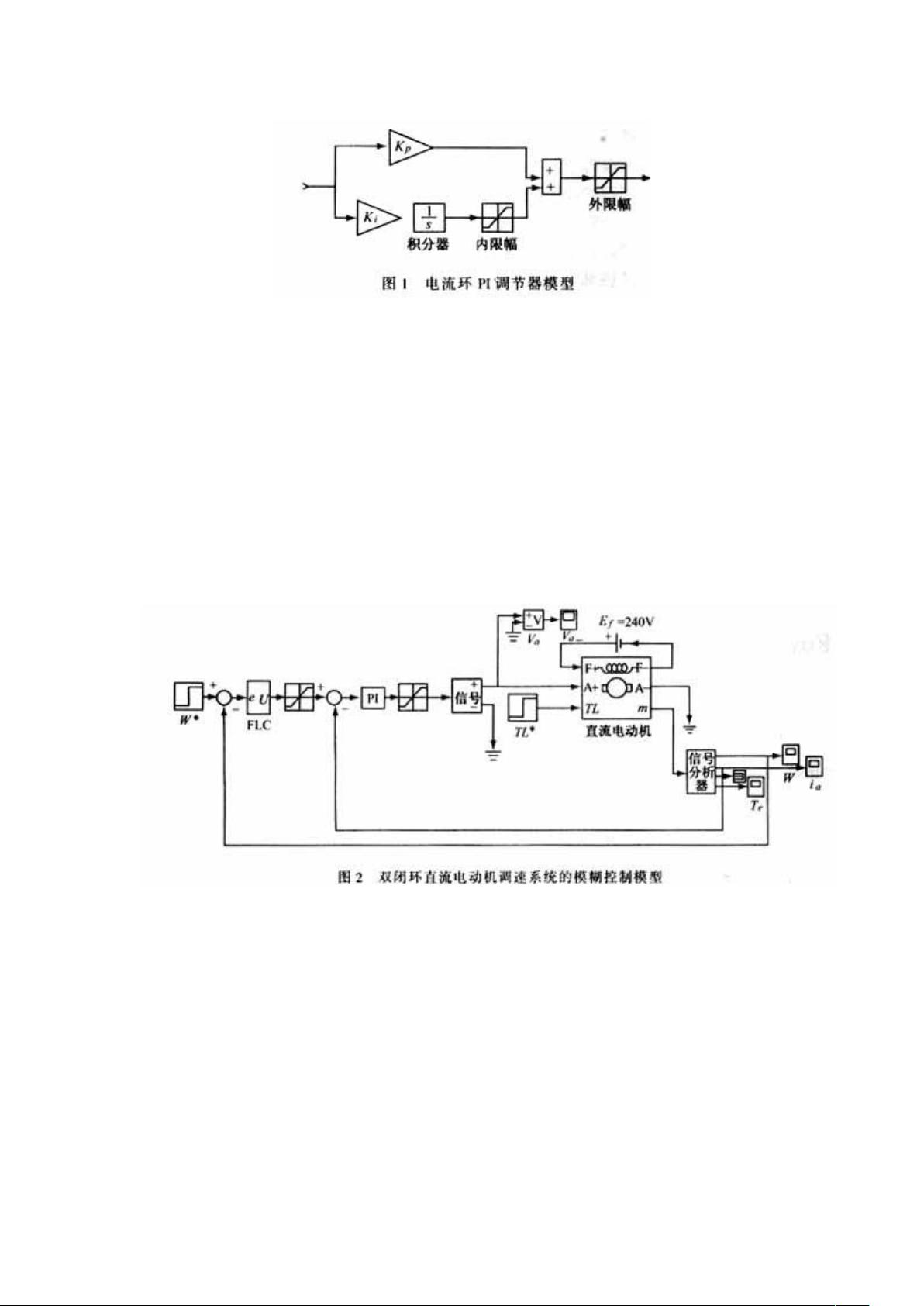
摘 要 针对直流电动机调速系统的非线性和构造参数易变化等特点,本文设计了模糊控制
器,建立了转速环为模糊控制的双闭环调速系统。为了验证模糊控制器的控制效果,本文
对直流电动机的参数变化、负载突变等不同情况进展了仿真研究,并将仿真结果与常规
PID 控制进展比拟。结果说明,模糊控制器在电机参数变化或负载突变时具有较好的控制
性能。
关键词 直流电动机 控制器 仿真
1 引言
直流电动机具有良好的起、制动性能,在电力拖动自动控制系统,如轧钢机及
其辅助机械、矿井卷杨机等领域中得到了广泛应用。然而传统直流电动机双闭
环调速系统大多采用构造简单、性能稳定的常规 PID 控制技术,由于在实际的
传动系统中,电机本身的参数和拖动负载的参数(如转动惯量)并不如模型那样
一成不变,在某些应用场合会随工况而变化;同时,电机本身是一个非线性的
被控对象,许多拖动负载含有弹性或间隙等非线性因素。因此被控制对象的参
数变化与非线性特性,使得线性的常参数的 PID 调节器常常顾此失彼,不能使
系统在各种工况下都能保持设计时的性能指标,往往使得控制系统的鲁棒性差,
特别是对于模型参数大 X 围变化且具有较强非线性环节的系统,常规 PID 调节
器难以满足高精度、快响应的控制要求,常常不能有效克制负载、模型参数的
大 X 围变化以及非线性因素的影响[1]。
模糊控制是一种典型的智能控制方法,广泛地应用于自然科学和社会科学的许
多领域[1],其最大的特点是将专家的经历和知识表示为语言控制规那么,
. .zj.

剩余11页未读,继续阅读
资源评论


pyhm63
- 粉丝: 10
- 资源: 20万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
- EBWO改进白鲸算法, 一种混合改进的白鲸优化算法 EBWO算法 改进点:两个点 1、引入准反向学习QOBL策略,提高算法的迭代速度 2、引入旋风觅食策略,提高算法开发能力 改进后的EBWO算法
- 1基于spring boot大学生社团活动平台.zip
- 1基于spring boot在线动漫信息平台.zip
- 1基于spring boot租房网站.zip
- 1基于spring boot的自习室预订系统.zip
- 1基于spring boot点餐平台网站.zip
- 卡通城堡蝴蝶素材儿童教学课件模板.pptx
- 卡通怪物幼儿园教学课件模板.pptx
- 卡通蜗牛幼儿园小学生家长会课件模板.pptx
- 太空飞船人物儿童小学教学课件模板.pptx
- 蓝色海盗船卡通幼儿园教学课件模板.pptx
- 七彩汽球飞鸽素材儿童教学课件模板.pptx
- 1基于spring boot滴答拍摄影项目.zip
- 田园风景卡通儿童教学课件模板.pptx
- 托起明天的太阳素材小学儿童家长会模板.pptx
- 新学年家长会儿童教学课件模板.pptx
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


