






Preprint. Work in progress.
NATURAL LANGUAGE REINFORCEMENT LEARNING
Xidong Feng
1∗
, Ziyu Wan
2∗
, Mengyue Yang
1
, Ziyan Wang
3
, Girish A. Koushik
4
,
Yali Du
3
, Ying Wen
2
, Jun Wang
1
1
University College London,
2
Shanghai Jiao Tong University,
3
King’s Collge London,
4
University of Surrey
ABSTRACT
Reinforcement Learning (RL) has shown remarkable abilities in learning poli-
cies for decision-making tasks. However, RL is often hindered by issues such as
low sample efficiency, lack of interpretability, and sparse supervision signals. To
tackle these limitations, we take inspiration from the human learning process and
introduce Natural Language Reinforcement Learning (NLRL), which innova-
tively combines RL principles with natural language representation. Specifically,
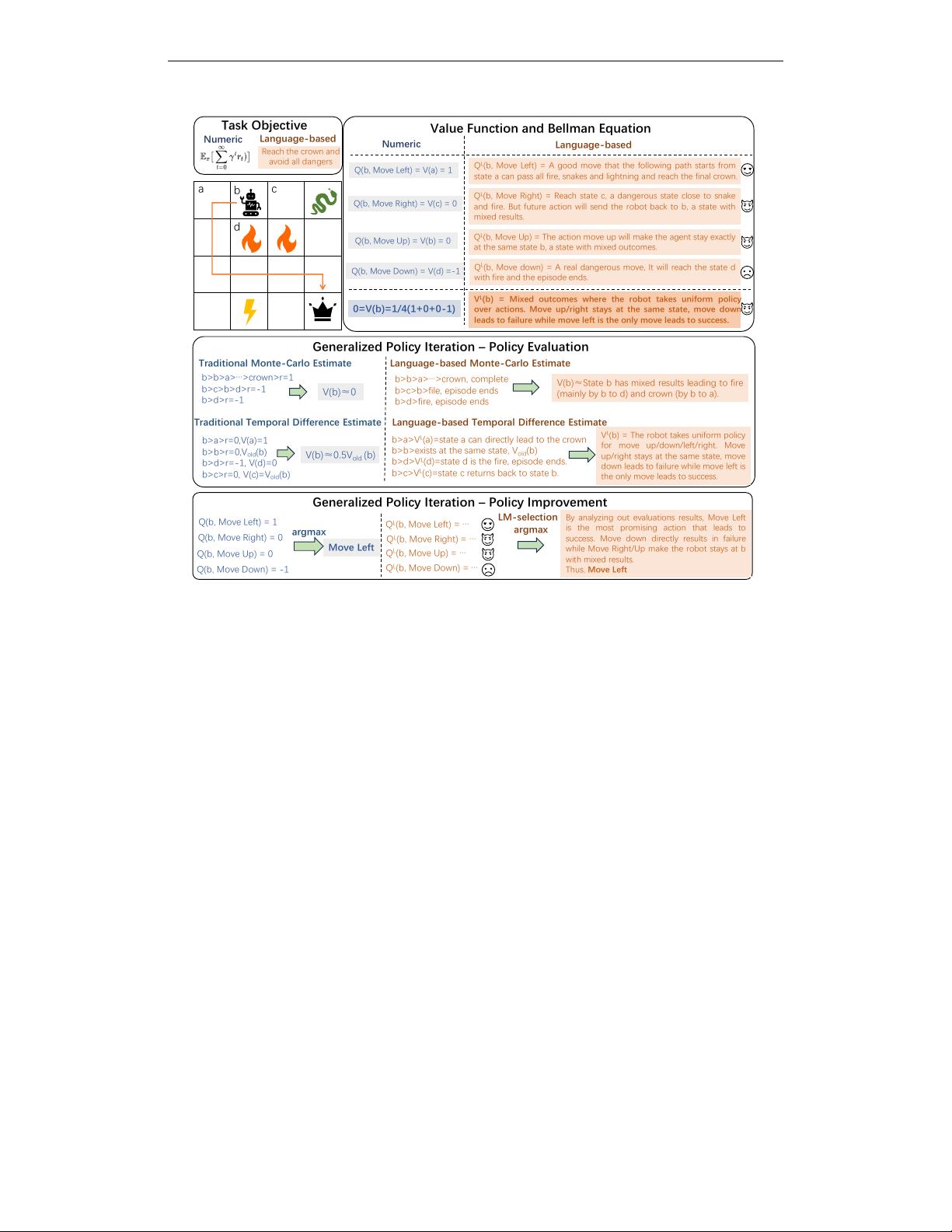
NLRL redefines RL concepts like task objectives, policy, value function, Bellman
equation, and policy iteration in natural language space. We present how NLRL
can be practically implemented with the latest advancements in large language
models (LLMs) like GPT-4. Initial experiments over tabular MDPs demonstrate
the effectiveness, efficiency, and also interpretability of the NLRL framework.
1 INTRODUCTION
Reinforcement Learning (RL) constructs a mathematical framework that encapsulates key decision-
making elements. It quantifies the objectives of tasks through the concept of cumulative rewards,
formulates policies with probability distributions, expresses value functions via mathematical ex-
pectations, and models environment dynamics through state transition and reward functions. This
framework effectively converts the policy learning problem into an optimization problem.
Despite the remarkable achievements of RL in recent years, significant challenges still underscore
the framework’s limitations. For example, RL suffers from the sample efficiency problem–RL algo-
rithms are task-agnostic and do not leverage any prior knowledge, requiring large-scale and extensive
sampling to develop an understanding of the environment. RL also lacks interpretability. Despite
the superhuman performance of models like AlphaZero (Silver et al., 2017) in mastering complex
games such as Go, the underlying strategic logic of their decision-making processes remains elusive,
even to professional players. In addition, the supervision signal of RL is a one-dimensional scalar
value, which is much more sparse compared with traditional supervised learning over information-
rich datasets such as texts and images. This is also one of the reasons for the instability of RL
training (Zheng et al., 2023; Andrychowicz et al., 2020).
These limitations drive us to a new framework inspired by the human learning process. Instead of
mathematically modeling decision-making components like RL algorithms, humans tend to conduct
relatively vague operations by natural language. First, natural language enables humans with text-
based prior knowledge, which largely increases the sample efficiency when learning new tasks. Sec-
ond, humans possess the unique ability to articulate their explicit strategic reasoning and thoughts in
natural language before deciding on their actions, making their process fully interpretable by others,
even if it’s not always the most effective approach for task completion. Third, natural language data
contains information about thinking, analysis, evaluation, and future planning. It can provide signals
with high information density, far surpassing that found in the reward signals of traditional RL.
Inspired by the human learning process, we propose Natural Language Reinforcement Learn-
ing (NLRL), a new RL paradigm that innovatively combines the traditional RL concepts and nat-
ural language representation. By transforming key RL components—such as task objectives, poli-
cies, value functions, the Bellman equation, and generalized policy iteration (GPI) (Sutton & Barto,
∗
Equal Contribution. Correspondence to xidong.feng.20@ucl.ac.uk.
1
arXiv:2402.07157v2 [cs.CL] 14 Feb 2024


剩余21页未读,继续阅读
资源评论

- #完美解决问题
- #运行顺畅
- #内容详尽
- #全网独家
- #注释完整

码流怪侠
- 粉丝: 2w+
- 资源: 435









最新资源
- 基于java的自习室管理和预约系统设计与实现.docx
- C++实现的基于huffman编码的文件压缩解压demo,供学习用
- No.1176 基于组态王和S7-200 PLC的锅炉温度控制系统设计 带解释的梯形图程序,接线图原理图图纸,io分配,组态画面
- 固体电介质电树枝击穿,以及SF6气体,流注放电过程
- libstdc++.so.6
- 两相交错并联buck boost变器仿真 采用双向结构,管子均为双向管 模型内包含开环,电压单环,电压电流双闭环三种控制方式 两个电感的电流均流控制效果好 matlab simulink plecs仿
- springboot在线教育平台.zip
- “互联网+”中国脉动地图——腾讯移动互联发展指数报告.pdf
- 【报告PDF】破解网络视频创新广告形式.pdf
- 【报告PDF】2015汽车消费新常态研究.pdf
- opencv-4.10.0-vs2019-x86
- 7大员工内推明星业.pdf
- 2013爱德曼新兴市场信任度调查.pdf
- 2014-2015 数字营销和O2O趋势.pdf
- 2014Q4与2015Q1新增对比报告.pdf
- 2014爱德曼中国企业信任度调查.pdf
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈























