
专家 PID 控制系统 Matlab 仿真
摘要:分析了一个速度控制器的控制仿真。其传递函数为:
523500
G(s)
s 87.35s 1047s
3
2
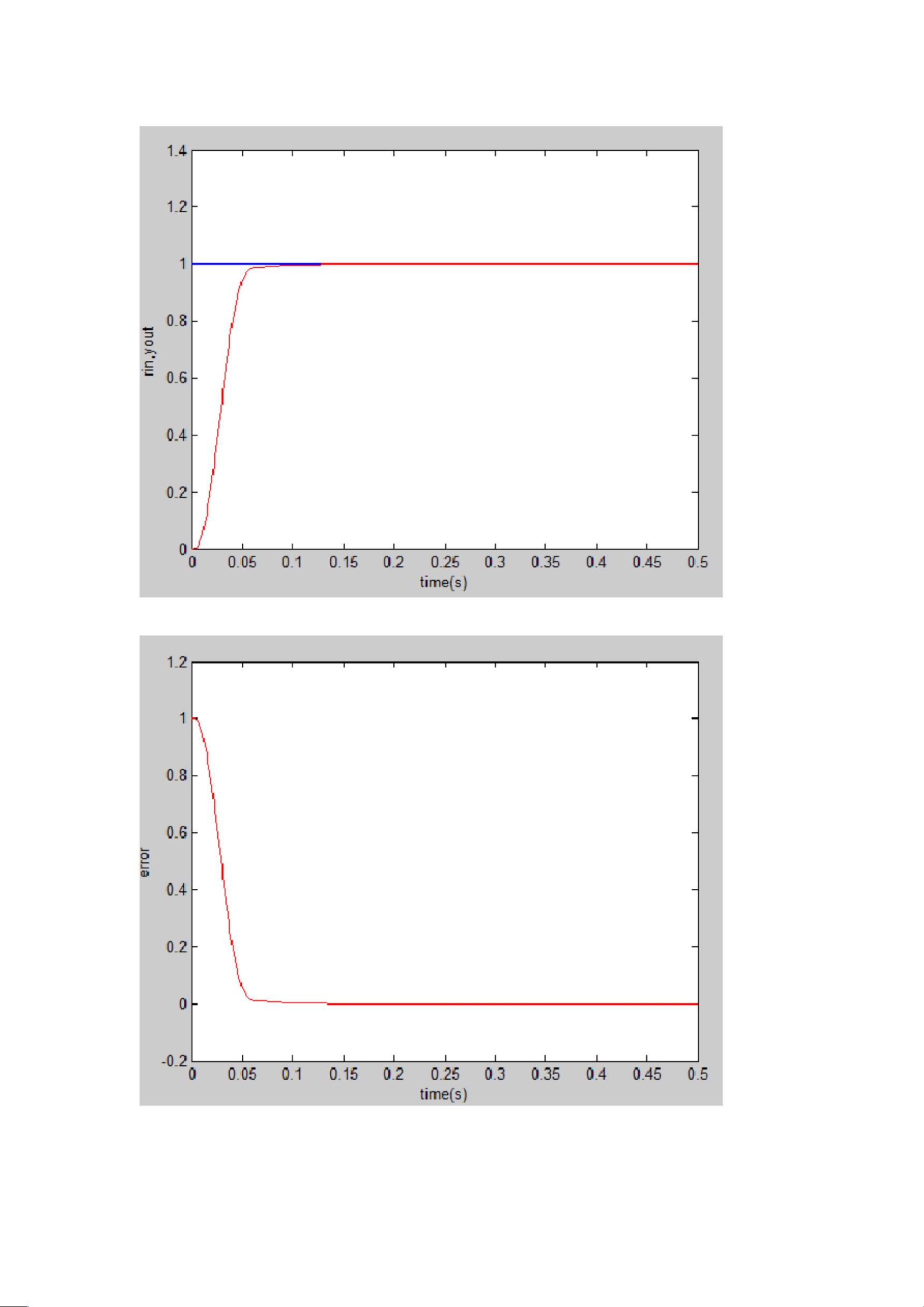
使用专家 PID 控制系统,输入信号为阶跃信号,取采样时间为 1ms,画出阶
跃响应曲线和误差变化曲线。
0 引言
专家控制(Expert Control)的实质是基于受控对象和控制规律的各种知识,并
以智能的方式利用这些知识来设计控制器。利用专家经验来设计 PID 参数便构
成专家 PID 控制。
典型的二阶系统单位阶跃响应误差曲线如图 1、2 所示。对于典型的二阶系统
阶跃响应过程作如下分析,根据误差及其变化,可设计专家 PID 控制器,该控
制器可分为五种情况进行设计。
1 设计
根据误差及其变化,可设计专家 PID 控制器,该控制器可分为以下五种情况
进行设计:
(1)当
| e(k) | M
时,说明误差的绝对值已经很大,不论误差变化趋势如何,
1
都应考虑控制器的输出应按最大〔或最小 )输出,以达到迅速调整误差,使误差
绝对值以最大速度减小。此时,它相当于实施开环控制。
(2)当 e(k) ( ) 0 时,说明误差在朝误差绝对值增大方向变化,或误差为
e k
某一常值,未发生变化。此时,如果
| e(k) | M
,说明误差也较大,可考虑由控
2
制器实施较强的控制作用,以达到扭转误差绝对值朝减小方向变化,并迅速减小
误差的绝对值。此时,如果
| e(k) | M
,说明尽管误差朝绝对值增大方向变化,
2
但误差绝对值本身并不很大,可考虑控制器实施一般的控制作用,只要扭转误差
的变化趋势,使其初误差绝对值减小方向变化。
(3)当 e(k) ( ) 0 , e(k) ( -1) 0 或 e(k) 0 时,说明误差的绝对值朝减
e k
e k
小的方向变化,或者已经达到平衡状态。此时,可考虑采取保持控制器输出不变。
(4)当 e(k) ( ) 0 , e(k) ( -1) 0 时,说明误差处于极值状态。如果此时
e k
e k
误差的
绝对值较大,可考虑实施较强的控制作用。
(5)当
| e(k) |
时,说明误差的绝对值很小,此时加入积分,减少稳态误差。

剩余20页未读,继续阅读
资源评论


xxpr_ybgg
- 粉丝: 6802
- 资源: 3万+









最新资源
- 分页双层皮带机sw16可编辑全套技术资料100%好用.zip
- java面向对象程序设计实验报告
- Screenshot_20250104_182336.jpg
- 面向对象程序设计实验二.doc
- 面向对象程序设计实验JDBC.doc
- 面向对象程序设计实验四.doc
- 面向对象程序设计实验五.doc
- 盖子堆垛机sw18可编辑全套技术资料100%好用.zip
- 废气回收装置sw16全套技术资料100%好用.zip
- 面向对象程序设计实验GUI.doc
- JAVA-API代码.doc
- GUI(2)代码.doc
- GUI(1)代码.doc
- 面向对象(下)代码.doc
- 高速智能点胶机x_t全套技术资料100%好用.zip
- 亚信安全ACCSS认证2024年5月题库.zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


