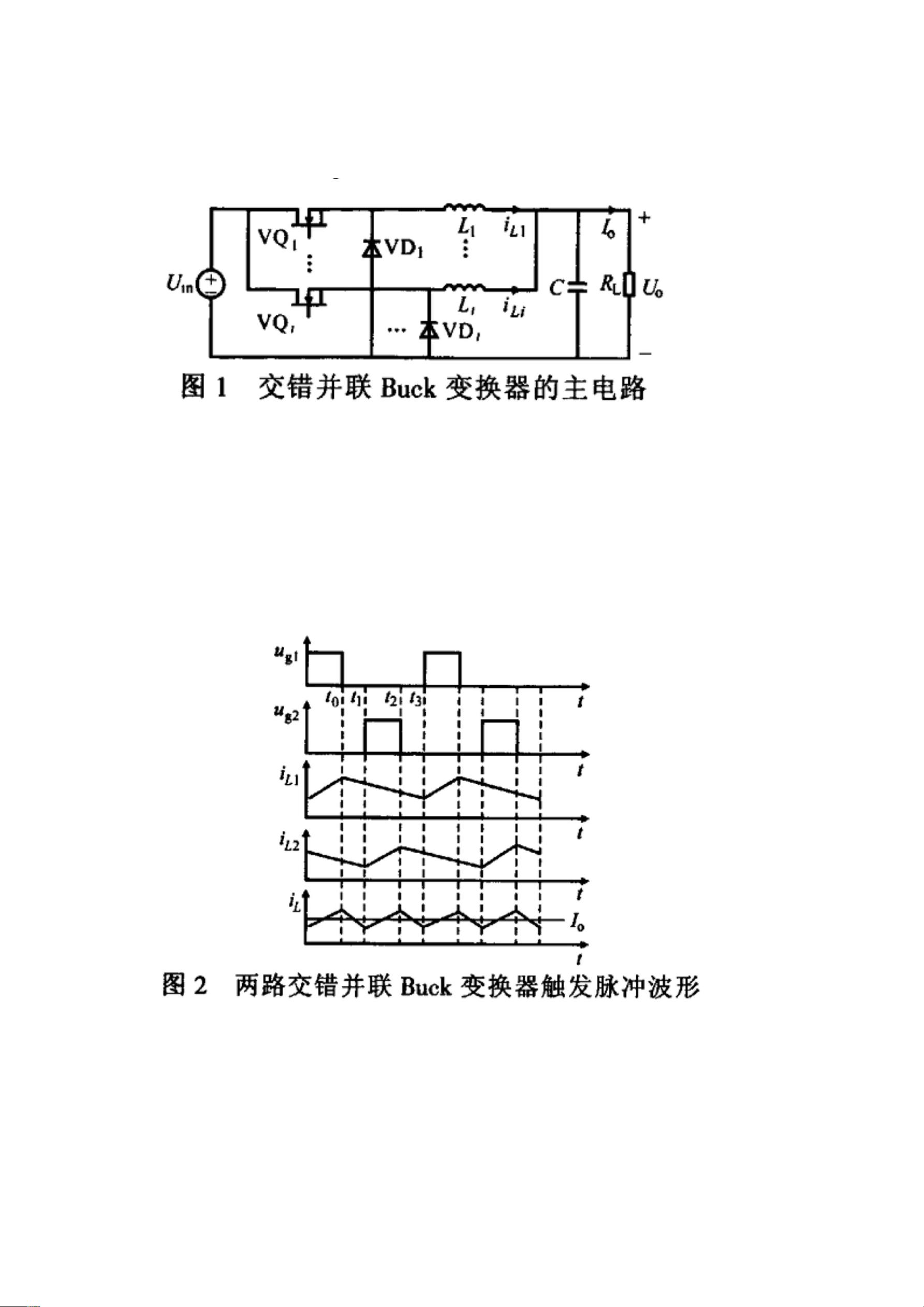
并联BUCK闭环控制是一种在电源转换领域广泛应用的拓扑结构,主要目的是为了提高系统功率输出,增强稳定性,并实现精确的电压控制。在本设计中,我们关注的是一个由两个BUCK变换器并联组成的系统,它采用了PID(比例-积分-微分)控制策略来优化输出电压和电流的性能。
输出电压被设定为4伏特,设计的目标是让输入电压能在尽可能大的范围内变化,这通常意味着变换器需要具备良好的输入电压适应性。在实际应用中,可能面临的输入电压范围可以从几伏特到几十伏特不等。通过并联BUCK电路,可以实现更高的总输出电流,同时每个变换器只承担一部分负载,降低单个器件的热应力。
输出电流被限制在连续且不超过2.5安培。在并联BUCK设计中,每个变换器的电流会被均衡,以确保它们不会过载。电流限制是通过电流感应和反馈机制实现的,以防止器件损坏。
再者,输出电压纹波的峰峰值要求小于50毫伏,这是一个非常严格的指标,确保了负载端的电源质量。为了达到这个目标,可能需要精心选择电容器和电感器的参数,以及优化开关频率。在这个案例中,开关频率设定为5千赫兹,这是一个常见的频率,既能保持良好的效率,又不至于增加过多的开关损耗。
BUCK变换器可以在连续导通模式(CCM)和断续导通模式(DCM)下工作。在DCM下,电感电流在每个开关周期内会降到零,这可能导致更大的输出电压纹波。因此,为了减少纹波,需要计算出临界电感值,使变换器工作在CCM与DCM的边界。对于并联BUCK,交错设计可以进一步降低输出电压纹波,因为两个变换器的开关活动可以相互抵消一部分纹波。
在Matlab中进行仿真可以帮助我们分析系统的动态响应、稳态性能和环路稳定性。通过调整PID控制器的参数(P、I、D),可以优化控制性能,例如快速的瞬态响应和良好的稳态精度。此外,仿真还可以揭示潜在的环路振荡和其他不稳定行为,以便及时进行校正。
对设计的反思是至关重要的。这可能包括对仿真结果的评估,对实际硬件测试的预期,以及对设计改进的思考。例如,是否需要更精细的电流平衡策略,或者如何在满足纹波要求的同时提高效率。
这个并联BUCK闭环控制系统结合了并联拓扑的优势和PID控制的精确性,以实现稳定的电压输出,适应宽范围的输入电压,同时控制电流和纹波在可接受的范围内。通过Matlab仿真和实际操作中的调试,可以不断优化系统性能,以满足各种应用需求。