西门子PLC四站流水线机械手自动化控制系统设计方案.docx
版权申诉


个人资料整理 仅限学习使用
基于西门子 PLC 的四站流水线机械手自动化控制系统设计
摘 要
机械手在先进制造领域中扮演着极其重要的角色。它可以搬运货物、分拣物品、代替人
的繁重劳动。可以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因
此被广泛应用于机械制造、冶金、电子、轻工和原子能等部门。而 PLC控制是目前工业上
最常用的自动化控制方法,由于其控制方便,能够承受恶劣的环境,因此,在工业上优于
单片机的控制。PLC将传统的继电器控制技术、计算机技术和通信技术融为一体 ,专门为工
业控制而设计,具有功能强、通用灵活、可靠性高、环境适应性强、编程简单、使用方便以
及体积小、重量轻、功耗低等一系列优点,因此在工业上的应用越来越广泛。
纵观了近年来机械手发展状况的基础上,结合机械手方面的设计,对机械手技术进行了系
统的分析,提出了用气动驱动和 PLC控制的设计方案。采用整体化的设计思想,充分考虑
了软、硬件各自的特点并进行互补优化。对机械手的整体结构、执行结构、驱动系统和控
制系统进行了分析和设计。在其驱动系统中采用气动驱动,控制系统中选择 PLC的控制单
元来完成系统功能的初始化、机械手的移动等功能。最后提出了一种简单、易于实现、理
论意义明确的控制策略。
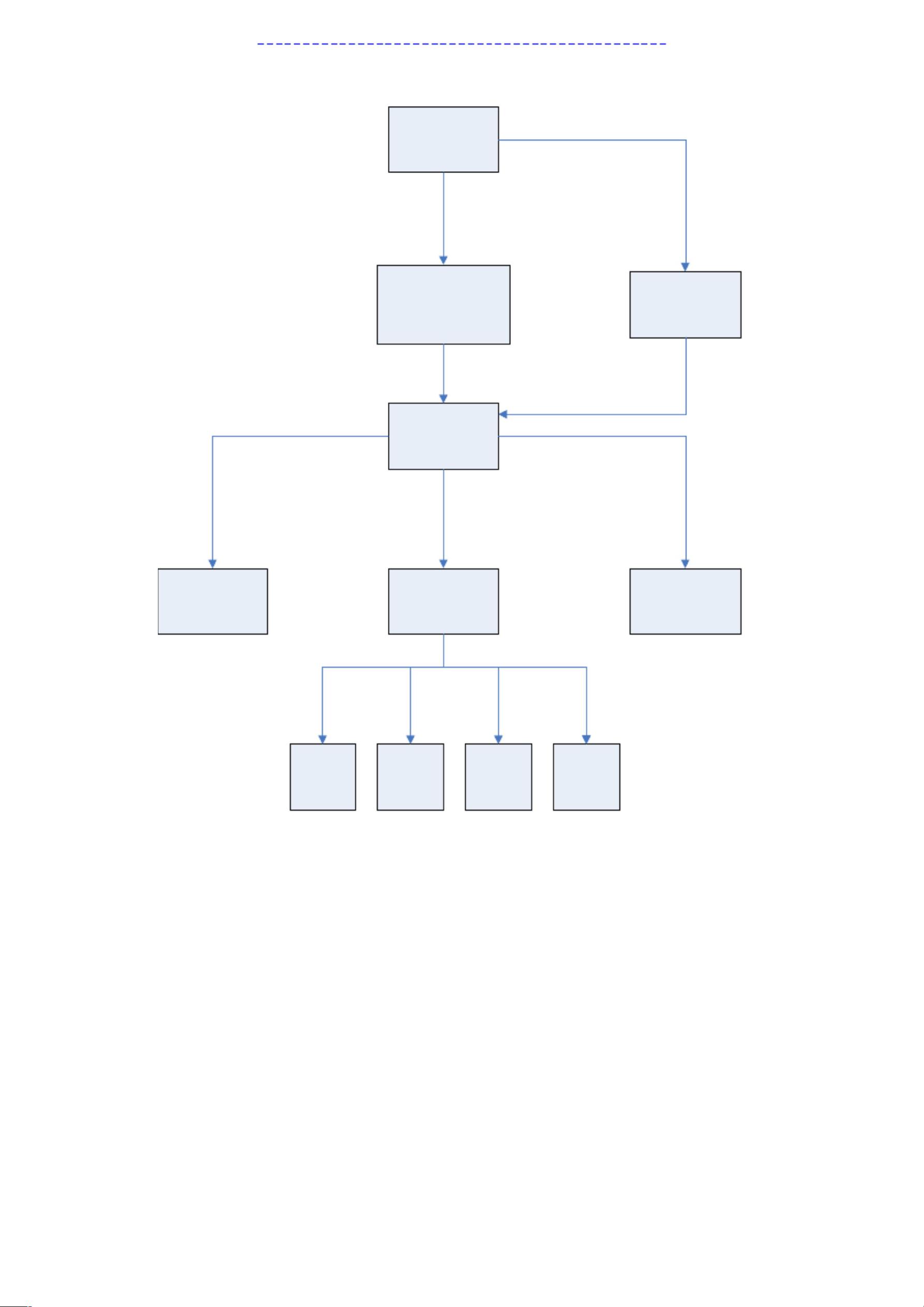
1.设计思路
机械手的总体结构原理,机械手主要由执行机构、驱动系统、控制系统以及传感器等组
成的。在PLC程序控制条件下,采用气压驱动方式,来实现执行机构的相应部位发生规定
要求的有顺序,有运动轨迹,有一定速度和时间的动作。同时按其控制系统的信息对执行
机构发出指令,必要时要对机械手进行监视,当动作有错误时或发生故障时立即发出报警
信号。检测装置随时将执行机构的实际位置反馈给控制系统,并与设定的位置进行比较,
然后通过控制系统进行调整,从而使机构,以一定的精确度达到设定小车位置。
机械手传送单元实际模型



剩余21页未读,继续阅读
资源评论

 m0_718412062024-01-13总算找到了自己想要的资源,对自己的启发很大,感谢分享~
m0_718412062024-01-13总算找到了自己想要的资源,对自己的启发很大,感谢分享~

xxpr_ybgg
- 粉丝: 6444
- 资源: 3万+











