

本科机械毕业设计论文 CAD 图纸 QQ 401339828
I
摘 要
加工中心是指在一次装卡中,能够实现自动铣削、钻孔、镗孔、铰孔、攻丝
等多工序的数控机床。更为明确的说法是:加工中心就是自动换刀数控镗铣床。这
就把加工中心和自动换刀数控车床和车削中心区别开来。
加工中心区别于别的数控镗铣床的主要特点就在于它具有根据工艺要求自动
更换所需刀具的功能,机自动换刀(ATC)机能。
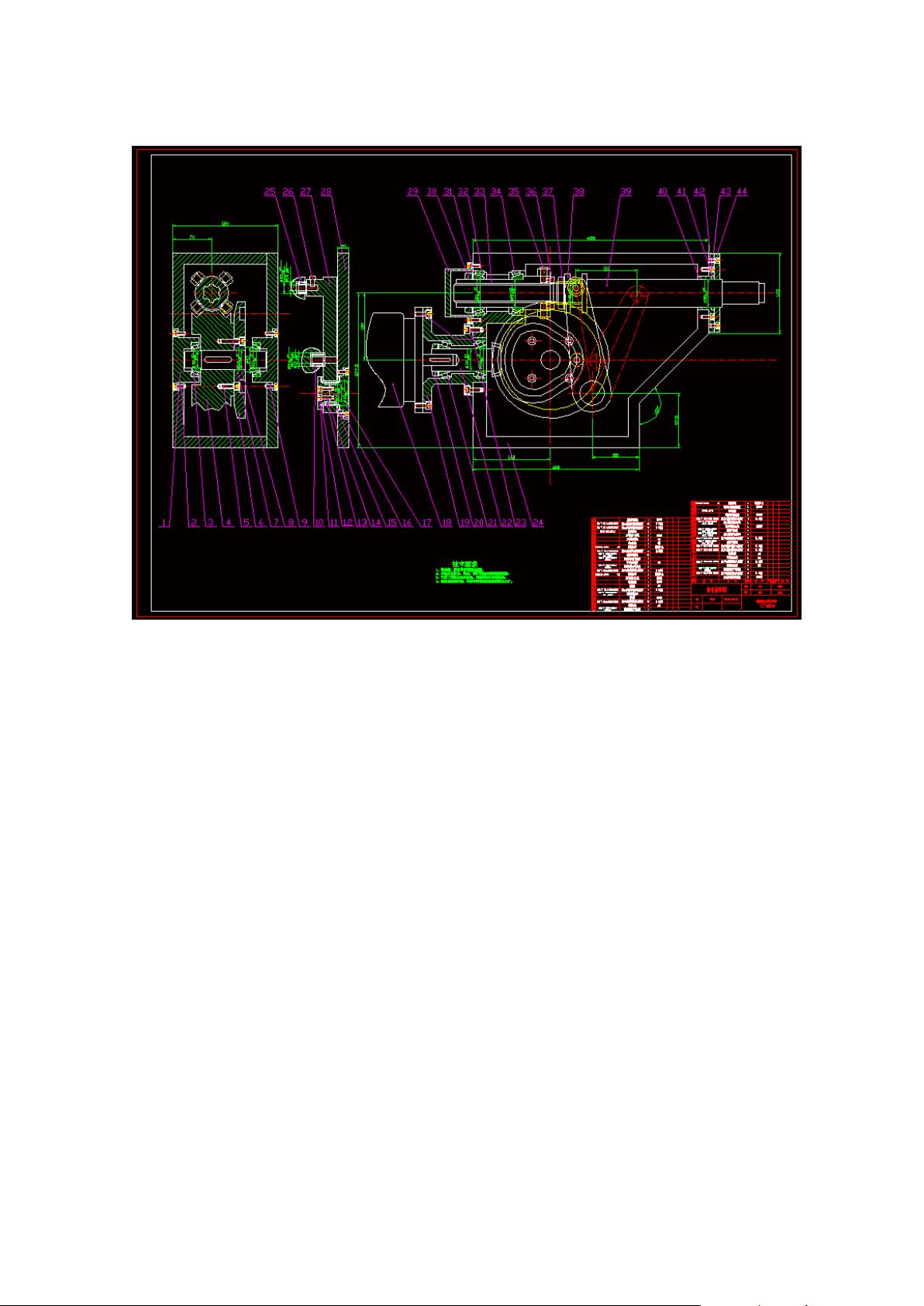
加工中心的自动换刀系统,通常是由刀库和机械手组成,它是加工中心的象征,
又是加工中心成败的关键环节。因此各加工中心制造厂家都在下大力研制动作迅
速、可靠性高的自动换刀装置,以求在激烈的竞争中取得好的效益。正因为自动换刀
装置是加工中心的核心内容,各厂家都在保密,极少公开有关资料,尤其机械手部分更
始如此。
加重中心的自动换刀形式,可分为有机械手换刀方式和无机械手换刀方式。加
工中心的 ATC,大都采用有机械手的换刀方式,因为更节省时间。
由于液压驱动的机械手需要采用严格的密封,还需较复杂的缓冲机构,控制
机械手动作的电磁阀都有一定的时间常数,因为换刀速度较慢。近年来国内、外先
后研制出凸轮联动式单臂双抓机械手。这种机械手的优点是由电机驱动,不需要较
复杂的液压系统及其密封、缓冲机构,没有漏油现象,结构简单,工作可靠。同
时,机械手手臂的回转和插刀、拔刀的分解动作是联动的,部分时间可重叠,从而
大大缩短了换刀时间。
关键词:机械手;加工中心;自动换刀



剩余59页未读,继续阅读
资源评论


xinkai1688
- 粉丝: 389
- 资源: 8万+









最新资源
- 车用驱动电机原理与控制基础-P140公式(6-57)~(6-58)
- MATLAB编程入门指南:环境搭建、基础语法及实用功能
- Oracle SQL Developer Data Modeler:数据建模与模型文档化及分享的最佳实践
- 使用 Python 为新年创建倒数计时器
- python语言huochepiao爬虫程序代码QZQ1.txt
- 2025 年新年快乐 -使用 HTML、CSS 和 JavaScript 设计新年贺卡
- Java毕设项目:基于spring+mybatis+maven+mysql实现的小区停车管理系统【含源码+数据库+毕业论文】
- Java毕设项目:基于spring+mybatis+maven+mysql实现的校园车辆管理系统【含源码+数据库+开题报告+毕业论文】
- 如何使用 Python 创建倒数计时器?
- Java毕设项目:基于spring+mybatis+maven+mysql实现的学生公寓管理系统【含源码+数据库+答辩PPT+毕业论文】
- 电子产品IM端子自动组装机sw14全套技术资料100%好用.zip
- Java毕设项目:基于spring+mybatis+maven+mysql实现的电动车租赁管理系统【含源码+数据库+毕业论文】
- 基于java的酒店客房管理系统的开题报告.docx
- 基于java的酒店预约及管理系统的开题报告.docx
- 电芯铝塑膜冲坑机sw14全套技术资料100%好用.zip
- 基于java的旅游攻略网站的开题报告.docx
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


