用于步进电机控制的TMC4361A闭环电机控制(AN032译文)

用于步进电机驱动器的 TMC4361A 闭环电机
控制
1 闭环电机控制
TMC4361A 为步进电机(门)驱动器提供闭环电机控制能力。通常,来自 TMC4361A 的电机驱动器的电流
值或阶跃脉冲仅基于内部计算。使用 TMC4361A 的闭环单元,输出电流分别为。内部步长生成器的步长/方
向输出将根据反馈数据直接修改。该反馈数据可以从不同的编码器类型获得,如增量 ABN 编码器或绝对 SSI
或 SPI 编码器。
1.1 闭环电机控制不是磁场定向控制
经典的磁场定向控制通常使用三个控制回路的级联。内环控制电机电流。控制速度以外的一个水平,直到达
到最终位置。电流控制回路始终分配一个换向角为 90°的电流,以获得最大扭矩。反馈通过编码器或相电流
和电压测量获得;在数学模型的帮助下。
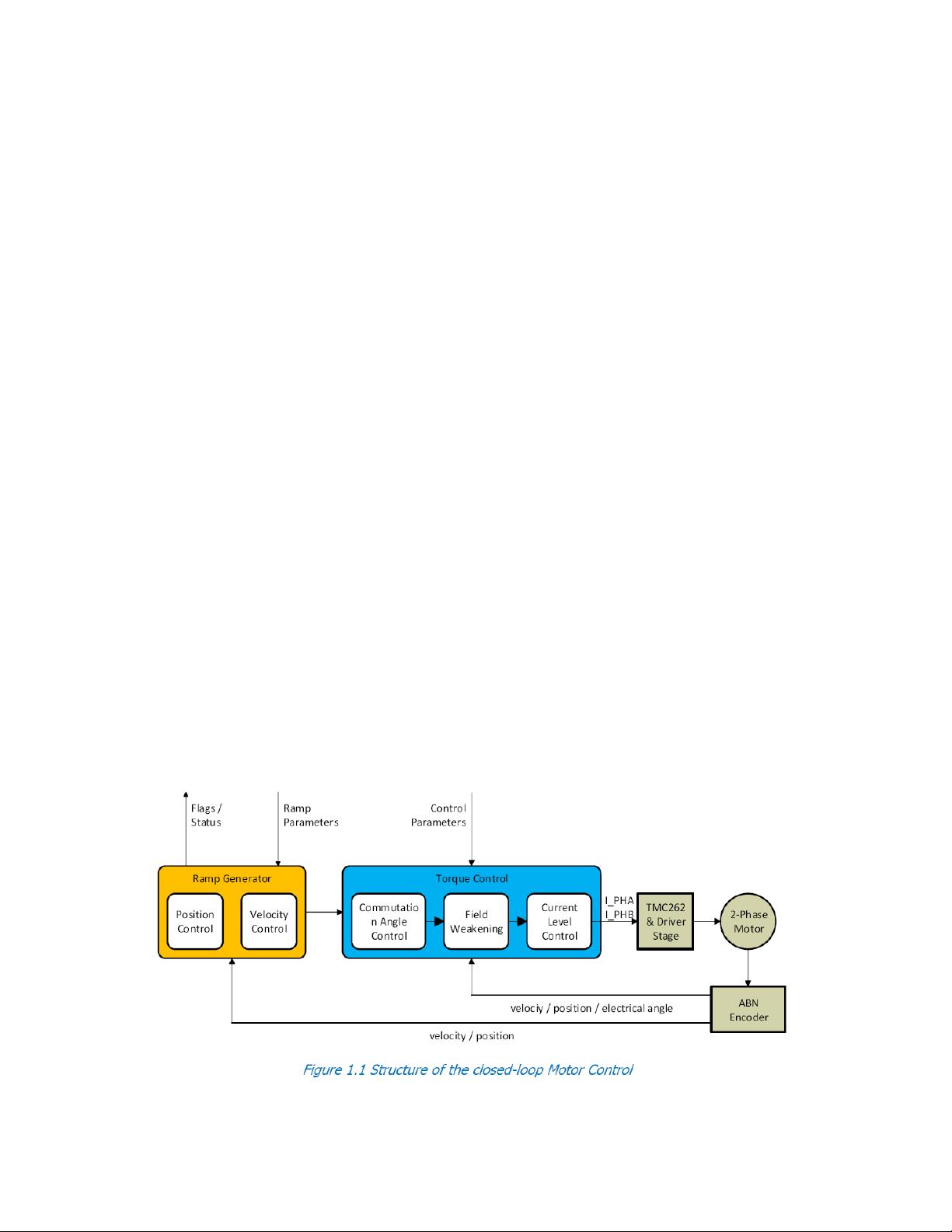
TMC4361A 的 2 相闭环控制采用了与 PID 控制级联不同的方法,PID 控制级联考虑了步进电机驱动器的特
性。分配目标和速度的斜坡发生器独立于位置控制(换向角控制),也独立于电流控制。闭环电机控制方案
如下图所示。


剩余42页未读,继续阅读
资源评论

 陌陌的日记2023-07-24这篇翻译文件提供了一些宝贵的实践经验,对于实际应用非常有帮助。
陌陌的日记2023-07-24这篇翻译文件提供了一些宝贵的实践经验,对于实际应用非常有帮助。 陈后主2023-07-24作者对于TMC4361A闭环电机控制有着扎实的了解,讲解清晰易懂,可以帮助读者快速上手。
陈后主2023-07-24作者对于TMC4361A闭环电机控制有着扎实的了解,讲解清晰易懂,可以帮助读者快速上手。 顾露2023-07-24文章内容结构清晰,逻辑性强,循序渐进,对于初学者来说很友好。
顾露2023-07-24文章内容结构清晰,逻辑性强,循序渐进,对于初学者来说很友好。 Msura2023-07-24这篇翻译文档对于步进电机控制相关知识进行了全面的介绍,让人受益匪浅。
Msura2023-07-24这篇翻译文档对于步进电机控制相关知识进行了全面的介绍,让人受益匪浅。 俞林鑫2023-07-24这篇文件具有很好的实用性,翻译准确,对于步进电机控制感觉更加有信心了。
俞林鑫2023-07-24这篇文件具有很好的实用性,翻译准确,对于步进电机控制感觉更加有信心了。












