

稳态误差:当系统在特定类型输入信号作用下,达到稳定状
态时系统精度的度量。
说明:误差产生的原因是多样的,我们只研究由于系统结
构、参量、以及输入信号的形式不同所引起的误差。
稳态误差分类:
跟随稳态误差:用于衡量随动系统的稳态性能。表示系统能以
什么精度跟随系统输入信号的变化,用e
sr
表示。
扰动误差:用于衡量恒值调节系统的稳态性能。表示系统在扰
动信号作用下系统偏离平衡点的情况,用e
sn
表示。
稳态误差=跟随稳态误差+扰动误差
e
ss
= e
sr
+ e
sn
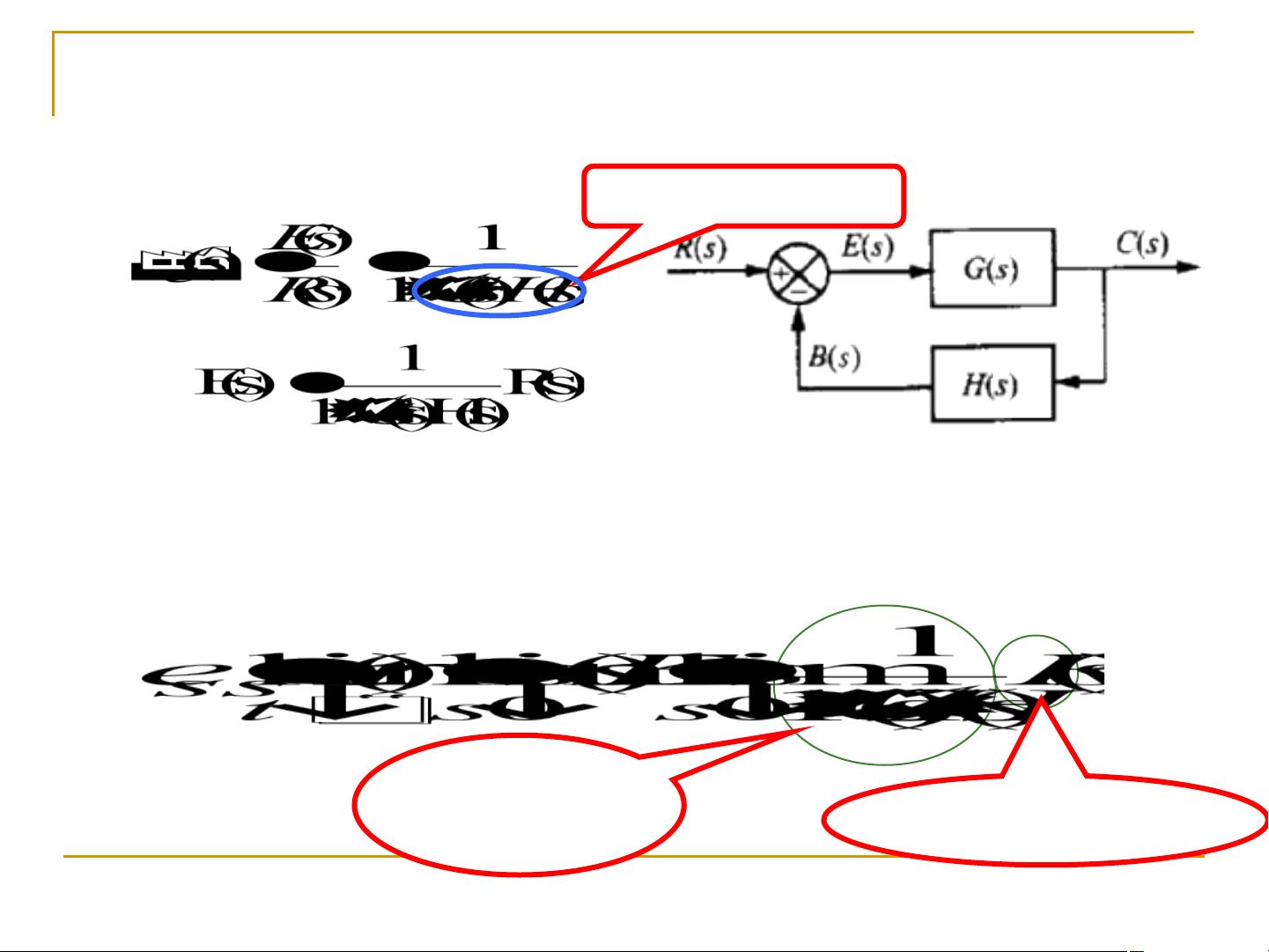
§3-11 控制系统的稳态误差



剩余27页未读,继续阅读
资源评论


wxg520cxl
- 粉丝: 25
- 资源: 3万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
- 洞见研报江阴振宏重型锻造(锻件及粉末冶金制品制造商,振宏重工(江苏)股份有限公司)创投信息
- 大学生在线租房平台--论文pf-springboot毕业项目,适合计算机毕-设、实训项目、大作业学习.zip
- 垃圾分类网站-springboot毕业项目,适合计算机毕-设、实训项目、大作业学习.zip
- 大学生就业服务平台--论文pf-springboot毕业项目,适合计算机毕-设、实训项目、大作业学习.zip
- 基于java的美食信息推荐系统的设计与实现pf-springboot毕业项目,适合计算机毕-设、实训项目、大作业学习.zip
- 洞见研报科沃斯(家庭服务机器人研发与生产商,科沃斯机器人股份有限公司)创投信息
- 大学生创新创业项目管理系统--论文pf-springboot毕业项目,适合计算机毕-设、实训项目、大作业学习.zip
- 大学生平时成绩量化管理系统pf-springboot毕业项目,适合计算机毕-设、实训项目、大作业学习.zip
- 工资信息管理系统--论文pf-springboot毕业项目,适合计算机毕-设、实训项目、大作业学习.zip
- 当代中国获奖的知名作家信息管理系统的设计与实现pf-springboot毕业项目,适合计算机毕-设、实训项目、大作业学习.zip
- 房屋租赁管理系统boot--论文pf-springboot毕业项目,适合计算机毕-设、实训项目、大作业学习.zip
- 果蔬作物疾病防治系统pf-springboot毕业项目,适合计算机毕-设、实训项目、大作业学习.zip
- 爱心商城系统pf-springboot毕业项目,适合计算机毕-设、实训项目、大作业学习.zip
- 商务安全邮箱邮件收发-springboot毕业项目,适合计算机毕-设、实训项目、大作业学习.zip
- 洞见研报卢米蓝(新型OLED材料研发生产商,宁波卢米蓝新材料有限公司)创投信息
- 基于python后端开发框架
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


