


© 2018 Microchip Technology Inc.
应用笔记
DS00002590B_CN 第1页
AN2590
采用降阶龙伯格观测器实现
PMSM
的无传感器
FOC
简介
目前的行业趋势表明,永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)是电机控制应用
设计人员的首选。与同类别的其他电机相比,它具有高功率密度、快速动态响应和高效率等优势。再结合
其能够降低制造成本和改善磁性能的特点,PMSM是产品大规模实现的理想推荐。
Microchip生产各种单片机以实现对所有类型电机的高效、稳健和多功能控制,并且提供必要工具集的参考设
计。这将加快新产品的学习速度并缩短新产品的开发周期。
AN2590
© 2018 Microchip Technology Inc.
应用笔记
DS00002590B_CN 第2页
目录
简介 .............................................................................................................................. 1
1. 磁场定向控制(FOC) ........................................................................................... 3
1.1 直轴电流参考 ............................................................................................................................. 5
1.2 角度问题..................................................................................................................................... 5
1.3 矢量控制总结 ............................................................................................................................. 5
1.4 坐标变换..................................................................................................................................... 7
1.5 无传感器位置估算 .................................................................................................................... 10
1.6 比例积分控制器背景知识.......................................................................................................... 13
1.7 空间向量调制 ........................................................................................................................... 14
1.8 启动步骤................................................................................................................................... 17
1.9 电机控制管理状态机 ................................................................................................................. 19
Microchip网站 ............................................................................................................. 20
变更通知客户服务 ....................................................................................................... 20
客户支持 ..................................................................................................................... 20
Microchip器件代码保护功能........................................................................................ 20
法律声明 ..................................................................................................................... 21
商标 ............................................................................................................................ 21
DNV认证的质量管理体系 ............................................................................................ 22
全球销售及服务网点 ................................................................................................... 23

AN2590
磁场定向控制(
FOC
)
© 2018 Microchip Technology Inc.
应用笔记
DS00002590B_CN 第3页
1.
磁场定向控制(
FOC
)
在使用PMSM时,转子磁场的速度必须等于定子(电枢)磁场的速度(即同步)。转子磁场和定子磁场之间
失去同步会导致电机停转。
FOC表示这样一种方法:将其中一个磁通(转子、定子或气隙)视为用于为其他磁通之一创建参考坐标系的
基础,其目的是将定子电流解耦为用于产生转矩的分量和用于产生磁通的分量。这种解耦保证了复杂三相电
机的控制方式与采用单独励磁的直流电机一样简单。这意味着电枢电流负责产生转矩,而励磁电流负责产生
磁通。本应用笔记中将转子磁通视为定子磁通和气隙磁通的参考坐标系。
表面安装永磁型PMSM(SPM)中FOC的特殊性在于定子i
dref
(对应于d轴上的电枢反应磁通)的d轴电流参
考设置为零。转子中的磁体产生转子磁链Λ
m
,这一点与交流感应电机(AC Induction Motor,ACIM)不同,
交流感应电机需要恒定参考值i
dref
来磁化电流,从而产生转子磁链。本章的后面部分将介绍内置式永磁
(Interior Permanent Magnet,IPM)型PMSM电机的d轴电流参考。
气隙磁通等于转子磁链的总和。这是由永磁体产生的,电枢反应磁链则是由定子电流产生的。对于FOC中的
恒转矩模式,仅d轴气隙磁通一项即等于Λ
m
,d轴电枢反应磁通为零。
相反,在恒功率运行中,定子电流中产生磁通的分量(即负i
d
)用于弱化气隙磁场以实现更高速度。
在不需要位置传感器和速度传感器的无传感器控制中,面临的挑战是实现一个能够抑制温度、开关噪声和电
磁噪声等干扰的稳定速度估算器。当应用对成本敏感时(不允许部件运动),通常需要无传感器控制。例
如,使用位置传感器时或在不利电气环境下运行电机时。但是,对于精确控制的要求(特别是在低速情况
下)不应视为给定应用的关键问题。
位置和速度估算基于电机的数学模型。因此,模型与实际硬件越接近,估算器的性能就越好。PMSM数学建
模依赖于其拓扑,主要分为两种:表面贴装电机和内置式永磁(IPM)电机。每种电机在不同应用需求方面
都有各自的优势和劣势。
提出的控制方案已开发用于表面贴装和内置式永磁同步电机。下图所示为表面贴装电机,与内置式PMSM相
比,该电机具有低转矩纹波和低成本的优点。由于所考虑电机类型的气隙磁通是平滑的,因此定子的电感值
L
d
= L
q
(非凸极PMSM)以及反电磁力(Back Electromagnetic Force,BEMF)是正弦曲线。
AN2590
磁场定向控制(
FOC
)
© 2018 Microchip Technology Inc.
应用笔记
DS00002590B_CN 第4页
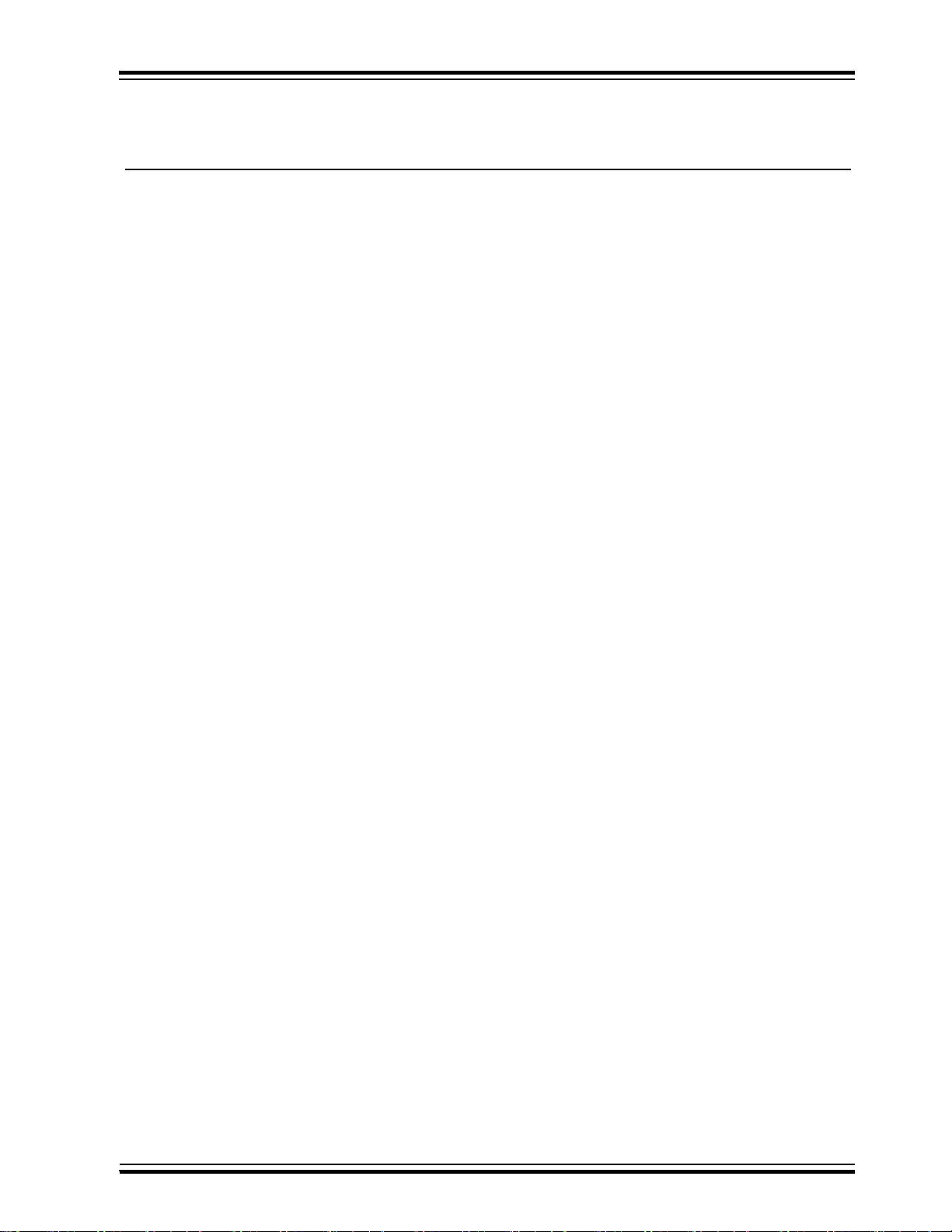
图
1-1.
表面贴装
PM PMSM
横向部分
电机横向部分
1. 转子轴。
2. 转子芯。
3. 电枢(定子)。
4. 具有电枢绕组的电枢槽。
5. 转子的永磁体。
6. 气隙。
下图所示为IPM电机,除永磁转矩外,还具有额外的磁阻转矩。与SPM类型相比,它在给定的工作电流下提
供更高的转矩。在内置式PM电机中,磁通路径的磁阻根据转子位置而变化。这种磁凸极性会导致电机端子
处的电感随转子位置变化。因此,受磁通路径中的PM影响,L
d
和L
q
的有效磁通长度不同,即L
d
≠ L
q
(凸
极)。因此IPM电机具有电感凸极性,并且它利用了磁阻转矩和永磁转矩。
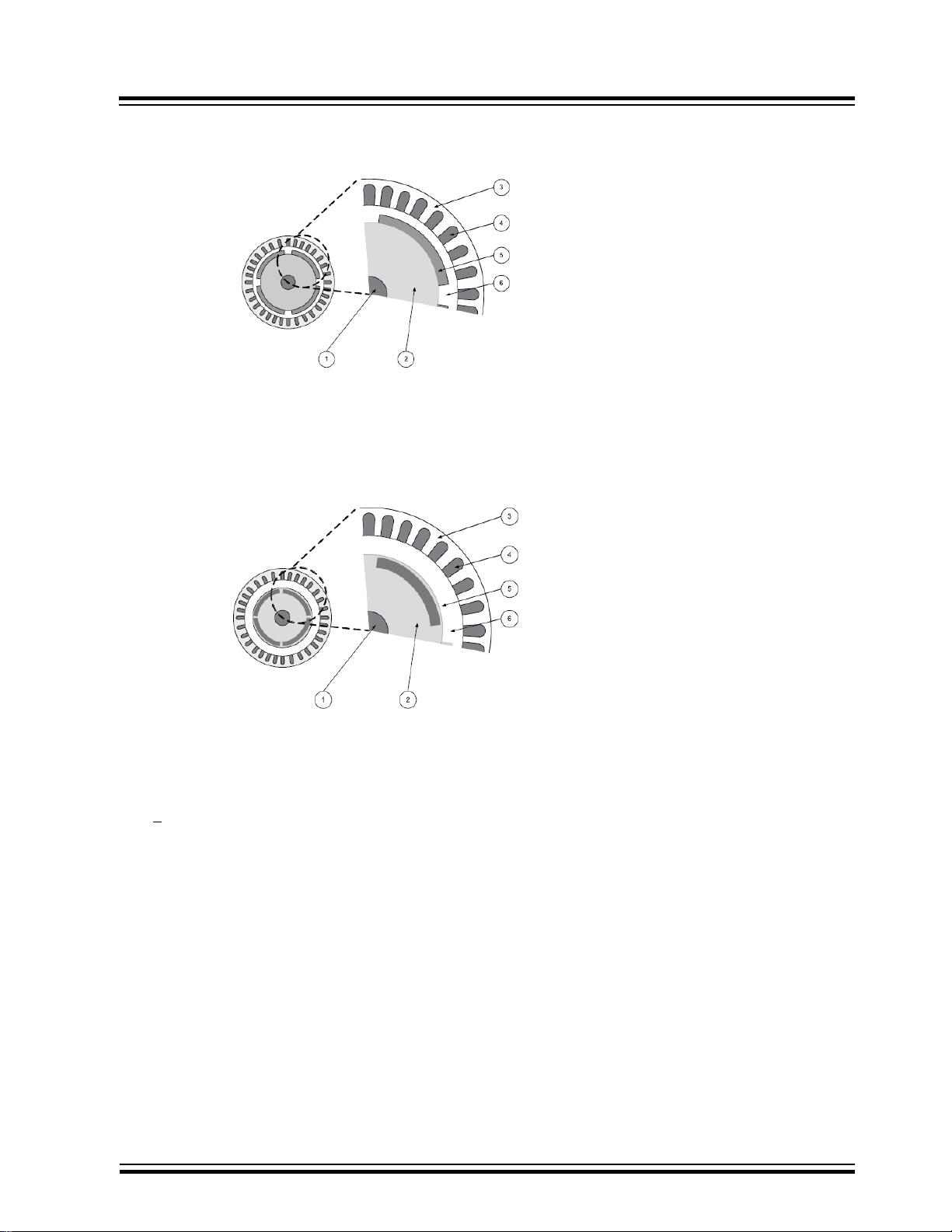
图
1-2. IPM
横向部分
电机横向部分
1. 转子轴。
2. 转子芯。
3. 电枢(定子)。
4. 具有电枢绕组的电枢槽。
5. 转子的永磁体。
6. 气隙。
IPM电机的转矩产生过程可用以下公式表示。
公式
1-1. IPM
电机的转矩产生
=
3
2
+ (
)
其中,
p为极对数
L
d
和L
q
分别为d轴和q轴的电感
i
d
和i
q
分别为d轴和q轴的电流
Λ
m
为磁链
产生的转矩由永磁转矩分量和磁阻转矩分量组成。PM转矩是由PM和定子绕组的转矩电流之间的相互作用产
生的。磁阻转矩是由作用于磁性材料上的力产生的,该力往往会与主磁通对准以使磁阻最小化。磁阻转矩与
永磁励磁无关。

AN2590
磁场定向控制(
FOC
)
© 2018 Microchip Technology Inc.
应用笔记
DS00002590B_CN 第5页
对于SPM电机,L
d
= L
q
,以上公式可简化为
公式
1-2. SPM
电机的转矩产生
=
3
2
因此,产生的转矩仅由永磁转矩分量组成。
1.1
直轴电流参考
在IPM电机中,与相应的BEMF电压同相的正交(q轴)电流分量仅产生磁转矩,而不产生磁阻转矩。直轴
(d轴)电流分量的相位与BEMF电压相差90度,与正交轴电流配合可产生磁阻转矩。因此,存在无数个提
供相同转矩量的电流向量。为了实现最高效的运行,应尽可能选择最小幅值的电流向量,以减少绕组损耗。
通过施加负i
d
,可以增加产生的转矩,该转矩值将是同等总电流消耗量下的最大值,这称为最大转矩/电流
(Maximum Torque per Ampere,MTPA)控制,i
dref
通过以下方式计算:
公式
1-3.
最大转矩
/
电流(
MTPA
)
=
2(
)
4(
)
+
对于SPM电机,与相应BEMF电压同相的正交轴电流分量将产生磁转矩,并且d轴电流参考(i
dref
)设置为零
(即i
dref
= 0。)
电机特性可以简化速度和位置估算器中使用的数学模型,同时可以有效使用FOC。估算器中使用的数学模型
将在后面的章节中说明。
1.2
角度问题
了解FOC(有时称为矢量控制)如何工作的一种方法是形成坐标参考变换过程的图像。从定子的角度可视化
交流电机的运行,可以观察到施加到定子的正弦输入电流。该时间变量信号将产生旋转磁通量。转子的速度
是旋转磁通向量的函数。从静止的角度来看,定子电流和旋转磁通向量看起来像交流量。
旋转的转子以与定子电流产生的旋转磁通向量相同的速度移动。稳态条件期间,从转子角度来看电机,定子
电流看起来像恒定值,并且旋转磁通向量是静止的。
目标是控制定子电流以获得所需的旋转磁通向量分量(不能直接测量)。坐标参考变换期间,可使用标准控
制环按照与直流值相同的方式控制定子电流。
1.3
矢量控制总结
间接矢量控制过程总结如下:














