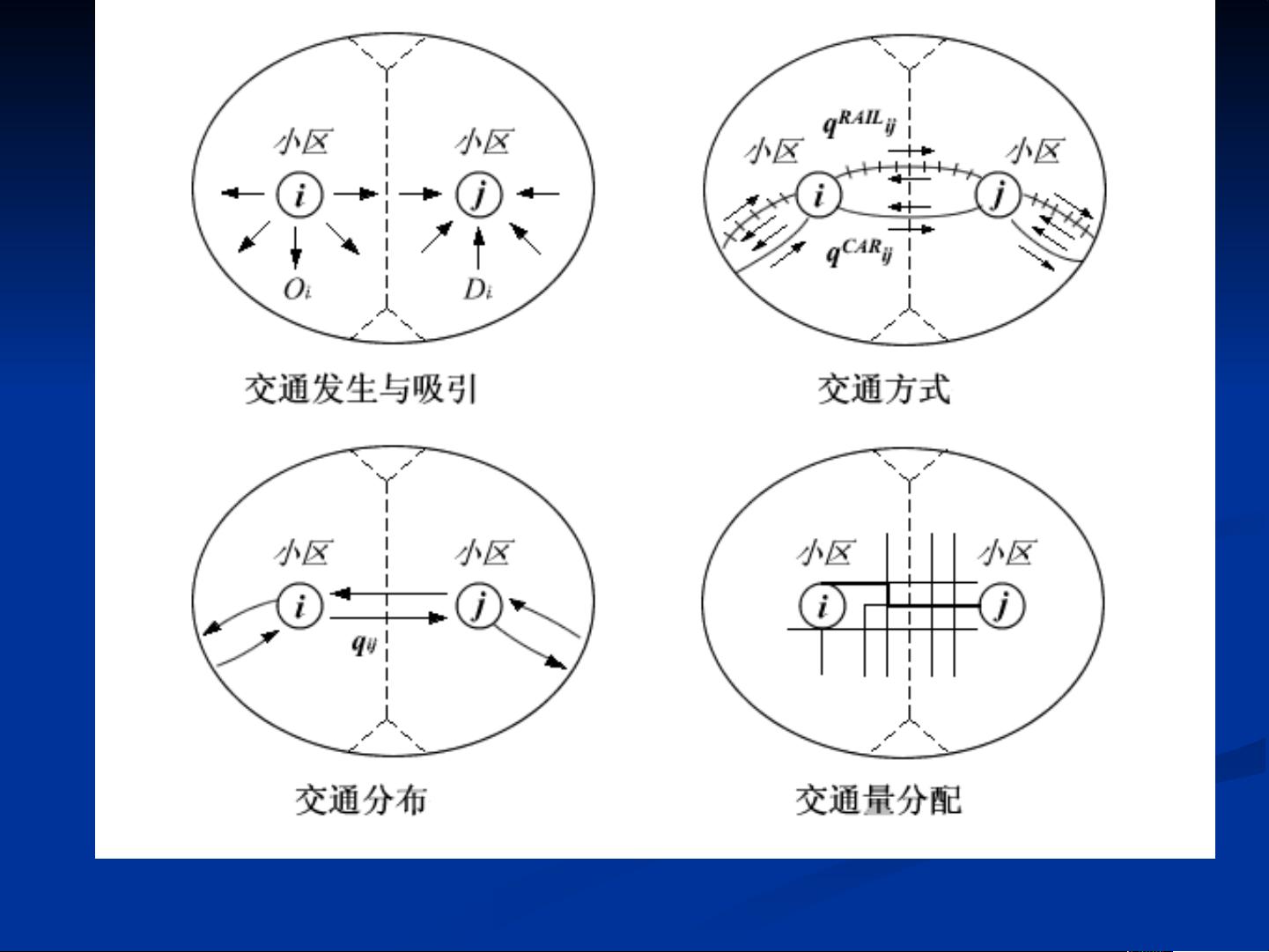
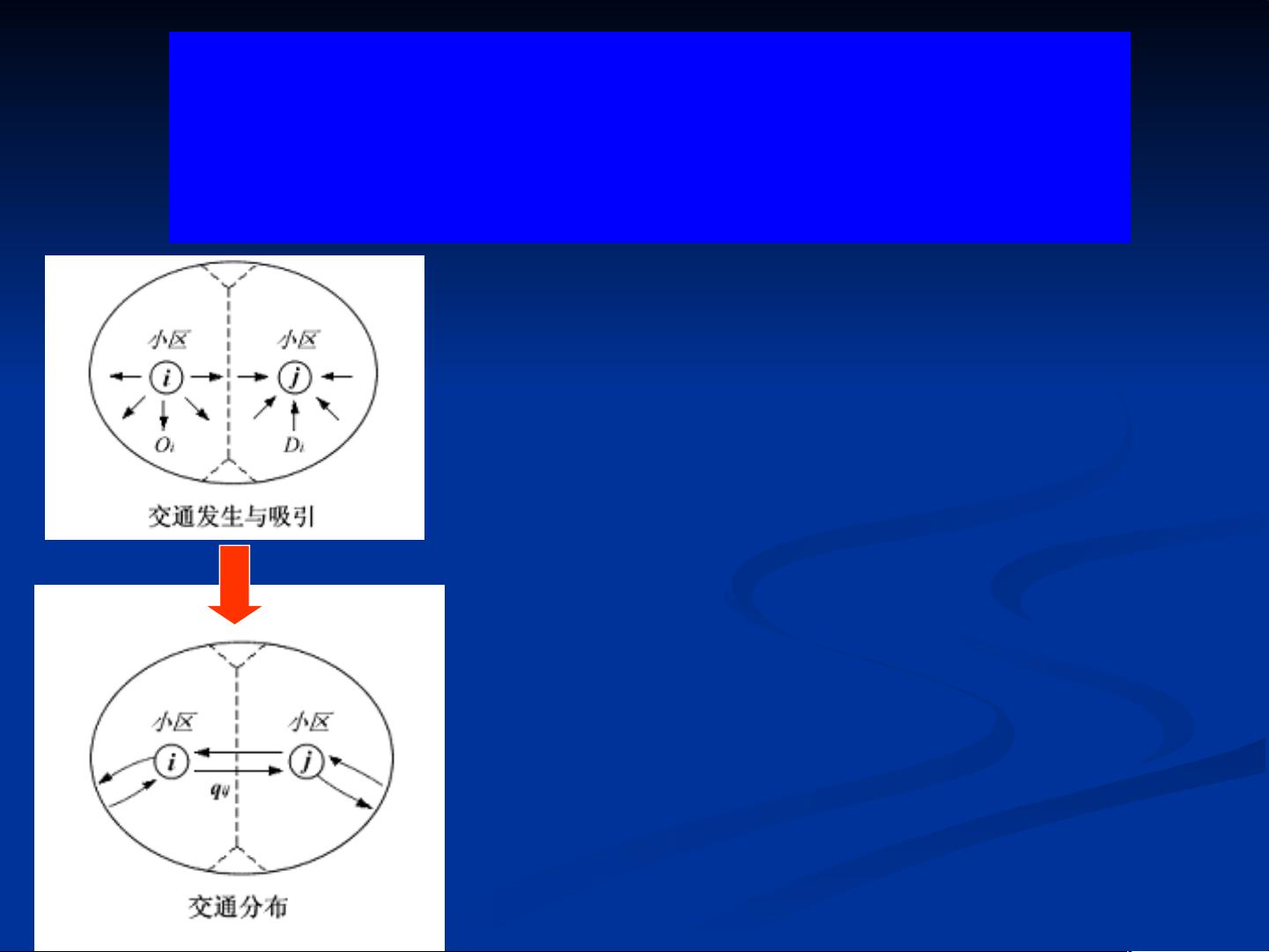
【数学交通分布预测】是城市交通规划中的关键环节,它主要涉及如何预测不同区域之间的交通流量分布。在交通规划的四阶段模型中,这属于第二步,即从交通发生量预测(Trip Generation)得到的数据出发,转换成具体的起止点(Origin-Destination, OD)交通流量矩阵。
交通分布预测的主要目标是构建OD矩阵,该矩阵列出了每个区域产生的出行量到其他各个区域的分配情况。预测方法通常包括增长系数法和综合法。
**增长系数法**是一种简化的预测方法,其基本假设是未来的交通分布模式与现有模式保持不变。这种方法分为几种类型,如常增长率法、平均增长率法、Detroit法(底特律法)、Fratar法(福莱特法)和Furness法(佛尼斯法)。其中:
1. **常增长率模型**假设交通流量的增长仅与发生地或目的地的交通生成量增长率相关,是一个恒定的比例系数。
2. **平均增长率法**则假设交通分布量的增长系数是发生地增长率和目的地增长率的平均值。
3. **Detroit法**考虑了发生地和目的地增长系数的乘积,并与整个规划区域的交通生成总量增长系数成反比。
这些方法在实际应用中,通常需要通过迭代过程,即不断地调整预测的OD矩阵,直到达到收敛条件,确保预测结果稳定。
例如,在常增长率模型的应用中,我们可以利用基础年(历史数据)的OD矩阵和目标年预计的交通发生量来计算目标年的OD矩阵。通过乘以相应的增长系数,可以得到新的预测值,然后进行比较和迭代,直至结果不再有显著变化。
在实际交通规划工作中,选择哪种方法取决于可用数据的完整性、预测精度需求以及计算资源的限制。综合法则是更复杂的方法,通常会使用数学模型(如Logit模型或Probit模型)来更精确地捕捉OD分布的动态变化,但这种方法需要大量实测数据以标定模型。
数学交通分布预测是理解和解决城市交通问题的基础工具,对于优化交通网络设计、评估交通政策效果以及预测交通系统未来发展具有重要意义。通过不断迭代和改进预测模型,规划者可以更好地为城市交通规划提供科学依据。