

3D occupancy grid mapping using statistical radar models
Johan Degerman
1
Thomas Pernst
˚
al
1
, and Klas Alenljung
2
Abstract— We have developed a numerically efficient occu-
pancy grid mapping method in three dimensions for auto-
motive radar, where we take into account the radar measu-
rement signal-to-noise ratio. The mapping performance, i.e.
to estimate length, height, and in-between spacing of parked
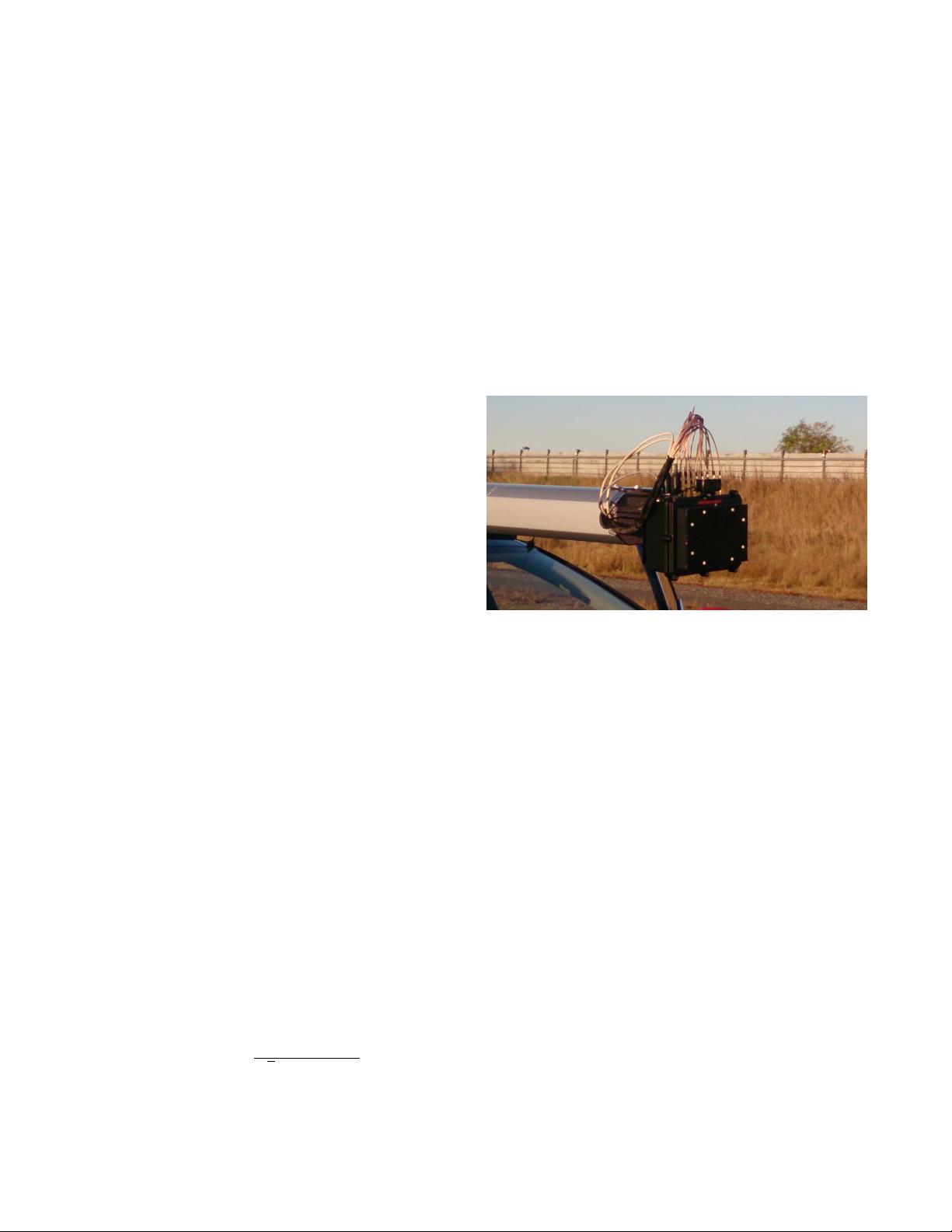
cars, is demonstrated as we use acquired data from a radar
prototype developed in collaboration with Qamcom Research
and Technology
3
. The radar has a unique antenna providing
unambiguous azimuth and elevation for a wide field of view
radar, covering ±50
◦
in both dimensions, making mapping
in three dimensions feasible. Employing self-developed off-line
radar signal processing on raw data, we extract SNR which
is used together with a Swerling 1 model to compute the
probability of detection for grid map update. Moreover, we
present a novel very simplistic way of updating the grid as we
use fast trilinear interpolation in the measurement domain, in
which the grid spacing is uniform. Having mounted the radar in
forward direction the EGO-vehicle drive parallel to four parked
cars with different inter-spacing, and we manage to measure
the distances within the error of the grid spacing, 0.2 m.
I. INTRODUCTION
As the automatic functions in today’s automobile increases
in complexity the need for robust sensors is inevitably also
becoming more important. This paper will focus on low-
cost automotive radar sensors, and their ability to create
an image of the environment. Radar sensors are, compared
to optical sensors like scanning lasers, very robust to bad
weather, dust and particles, vibrations and rough conditions
in general. They also possess the ability to measure ra-
dial velocity instantly, which facilitates reliable detection
of moving objects. In addition they are quite cheap as
compared to scanning lasers. Of course, they have some
disadvantages, like interference problems and relatively low
resolution. In this paper we will target the resolution (and
accuracy) issue of the radar, and show the potential of radar
4D measurements (range, doppler, azimuth and elevation) by
forming a 3D image of the stationary environment, by using
what is called occupancy grid mapping.
Much of the work in today’s automotive safety systems is
related to autonomous functions, like autopilots for highways
or even autonomous drive in urban environment. There exists
two main approaches for making the vehicle understand what
is the environment in the autonomous drive research, one
where sensor data is refined to features representing some
part of the environment. Using this information the vehicle
can make decision about where to drive and where not to.
1
is with SafeRadar Research Sweden, Knipplakullevgen 9 439 52
˚
Asa,
Sweden johan.degerman@saferadar.se
2
is with DENSO Sales Sweden, G
¨
otaverksgatan 6A, 417 55 G
¨
oteborg,
Sweden k.alenljung@denso.se
3
Qamcom Research & Technology, Falkenbergsgatan 3, 412 85
G
¨
oteborg, Sweden magnus.kilian@qamcom.se
However, mimicking the human driver is extremely difficult
due to the high complexity of the environment. The second,
and presumably more reliable approach [4], is to rely on
detailed maps which combined with sensor readings localizes
the vehicle, and we obtain very useful prior information
of the environment. This has been researched for decades,
starting with indoor robotics, and is usually called SLAM
(simultaneous localization and mapping). Our work aims to
investigate the possibility of the commercial low-cost auto-
motive radar sensors playing a bigger role in the localization
and mapping systems. The contribution is making occupancy
grid in 3D using radar, which is much thanks our ability
to measure both azimuth and elevation accurately. Also, we
have a novel numerically efficient procedure for handling the
inverse sensor model in the grid map update using trilinear
interpolation, which enables for real-time processing of 3D
data.
II. BACKGROUND
As mentioned, localization and mapping is a well studied
field of research and there exists vast number of publications
starting at the previous century. Radar-SLAM using extended
Kalman filter for interleaved mapping and EGO-vehicle
localization was performed by Clark in 1999 [3]. Here,
the environment is represented by a discrete set of land-
marks which is the traditional representation. The association
between measurements and landmarks needs be correct all
the time or else the vehicle pose will get a bias error (and the
map will get distorted). To handle the association problem
there exists multi-hypothesis approaches such as FastSLAM
[11] and [15]. However, for radar SLAM it is common to
circumvent the problem by representing the environment as a
grid and apply scan matching. A nice approach was taken by
[16] where they use a FMCW radar and signal power down
range (no detections) for each measured bearing rather than
the set of detected plots. Scan matching works in 2D and
is convenient when the sensor is mechanically scanning a
narrow lobe, but it requires a high rotation frequency (or low
vehicle speed). Actually, some years earlier [5] performed
3D radar mapping also with radar, but with a pencil beam
mechanically scanned in both azimuth and elevation (similar
to a Lidar).
More recent work from [17] show the potential of ra-
dar scan matching as a great way of circumventing the
association problem which arises in the landmark-based
EKF approaches. They use a 24 GHz 360
◦
2D scanning
FMCW radar. However, the scanning rate is 1Hz which
is definitely a showstopper when it comes to automotive.
Localization is made by cross correlation and Fourier-based
2016 IEEE Intelligent Vehicles Symposium (IV)
Gothenburg, Sweden, June 19-22, 2016
978-1-5090-1821-5/16/$31.00 ©2016 IEEE 902
剩余6页未读,继续阅读
资源评论













