






1
基于计算几何与等间距遍历的无人机避障规划研究
摘 要
当前,无人机使用量大幅增加,使用环境日益复杂,不同障碍物环境下无人机的避
障航迹规划成为了研究的热点问题。本题简化了实际应用场景,仅探讨两架无人机在面
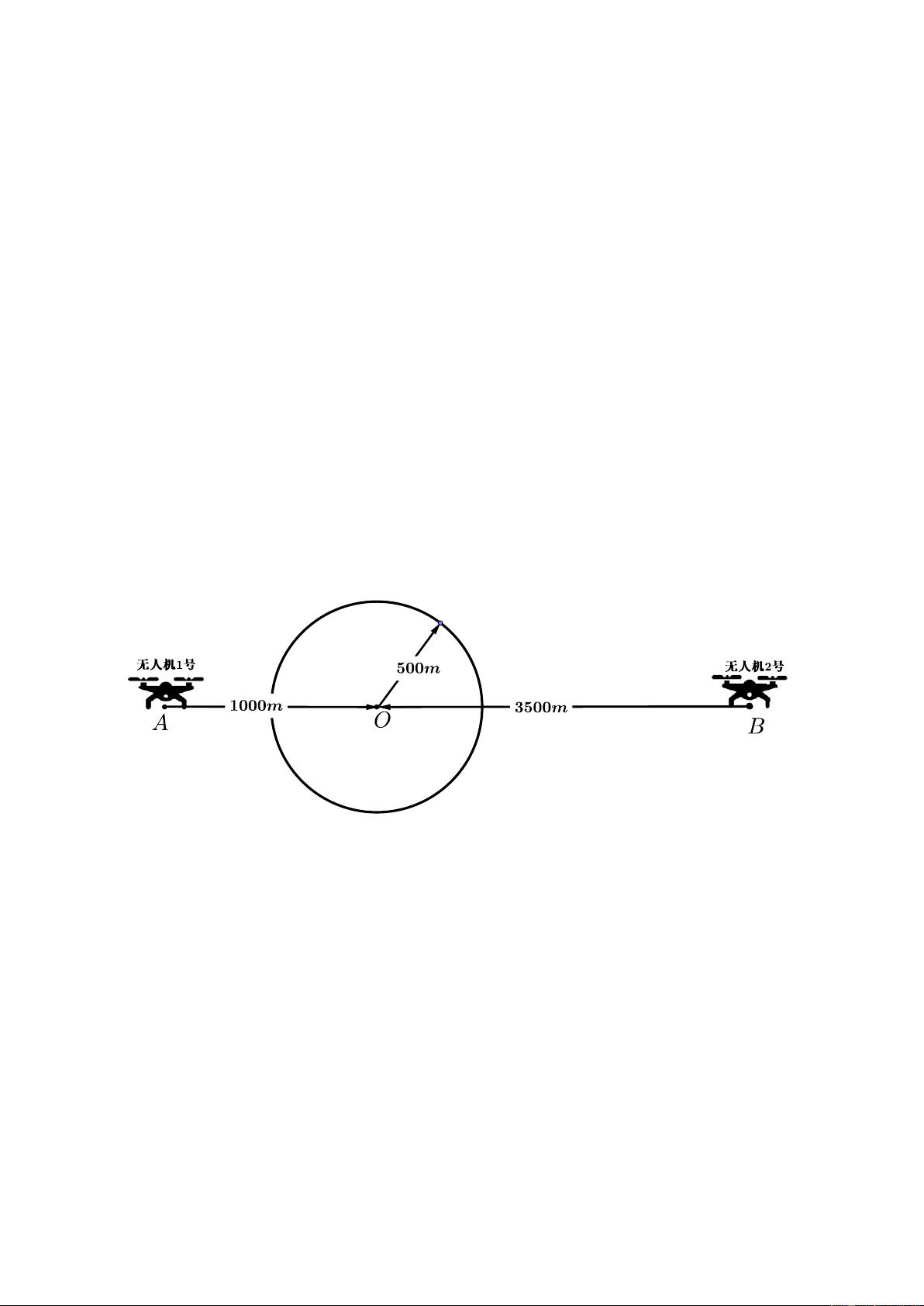
对圆形障碍物时的情形。具体研究内容如下:
针对问题一,本问需实现两架飞机中第一架到的无人机用时最短。首先,需明确的
是,为满足两架无人机必须避开障碍圆且不能碰面的约束条件,从 B 点出发的 2 号无人
机应第一个到达目的站点。其次,本文证明了沿 A 与圆 O 切线-两切点连成圆弧-B 与圆
O 切线是所有路线中的最短路径。之后,需考虑 1 号避开由 B 点直接按切线路径飞行的
2 号,即需要明确 1 号在到达上切线切点之前“等候”多长时间可使两者不会发生碰面
的情况。结合实际情况与题目提供的条件,本文考虑采用以大于 30 米的旋飞半径绕飞
来代替悬停的效果,就此规划两架无人机的最佳行进路径。得出:B 点出发的 2 号无人
机先到达目的站点,用时为 466.36 秒,其中,1 号以 31.807m 为半径绕了 13 圈对 2 号
避让,之后 1 号可按直线飞行直接驶往目的站点 B;2 号直接按“最短路径”飞往目的
站点 A。
针对问题二,本问需实现两架无人机中第二个到达目的站点的用时最短。求解出该
类的问题关键在于将“无人机避开障碍圆”与“两架无人机的连线与障碍圆相交”的两
个约束条件进行有效的转化。首先,本文将以上两个约束条件转化为满足两个无人机运
动点均位于对应切线左侧的条件,并进行了相关论证。之后,经画图探索,本文发现可
通过切线设置 2 号无人机在 1 号无人机路径上的从动点,将原问题的“不碰面”问题转
化为“追逐问题”。之后,本文观察被动点的速率随 1 号主动点的横坐标变化趋势,进
而求解了该问题,得出:A 点出发的无人机后到达目的站点,用时为 606.2 秒,1 号无
人机在 A 点以半径米绕行 5 圈后,再以“最短路径”飞向目的地 A;2 号无人
机则直接按照最短路径飞行。
针对问题三,本问需探究 B 站点到圆心的距离变化时,问题 1 和问题 2 的最优航迹
发生变化的情况。本文分情况讨论 B 点到圆心距离,发现关键值为 2026 米,得出:当
距离在(500,2026]时两机可直接按最短航线飞行;当 B 站点到圆心的距离在(2026,+∞)变
化时,1 号无人机需在 A 处进行“绕飞等待”, 依旧后到达目的站点。
针对问题四,本问需探究当 2 号无人机的恒定速率在[10,30] m/s 内变化时,问题 1
和 2 中的航迹变化。由于在问题一中的模型,本文考虑的是 2 号无人机直接按照最短路
径飞行,1 号通过绕飞的形式进行避让。实际上,2 号无人机的恒定速率增加,只会减
少 1 号无人机的避让时间。由此得出:当 2 号的速率大于后,第二架到达目的站
点的无人机最少用时变成了恒定的,表明两架无人机均无需避让可以直接按最
短飞行路径飞往目的地。
针对问题五,本问需考虑当 2 号无人机的恒定速率在[10,50] m/s 内变化、B 站点到
圆心的距离在[1,10] km 内变化时,问题 2 中的最优航迹变化的情况。本文将两架无人机
的飞行情况共分为三种,并发现:当 2 号无人机的速率越快,B 站点到圆心的距离越短
时,第二架无人机到达目的站点的飞行时间越短;当 2 号无人机的速率在左右,
B 站点到圆心的距离在后段区间变化时,第二架无人机到达目的站点的飞行时间总体大
于其他情况且随着距离越大时间增加越快。
关键词:从动点 遍历搜索 最短路径 追逐问题 计算几何
















- 1
- 2
前往页