





1
基于几何构形和人工势场的无人机协调避障问题研究
摘 要
随着无人机的快速发展,空中交通管理成为一个重要问题。在无人机飞行中,避免
碰撞和优化航迹是确保安全且高效运行的关键。通过避障航迹优化,可以确保无人机避
开障碍物并安全地完成任务;航迹的优化可以减少资源消耗以及提升无人机任务完成效
率。本文在特定情境下基于几何构形和人工势场给无人机协调避障问题提出解决方案。
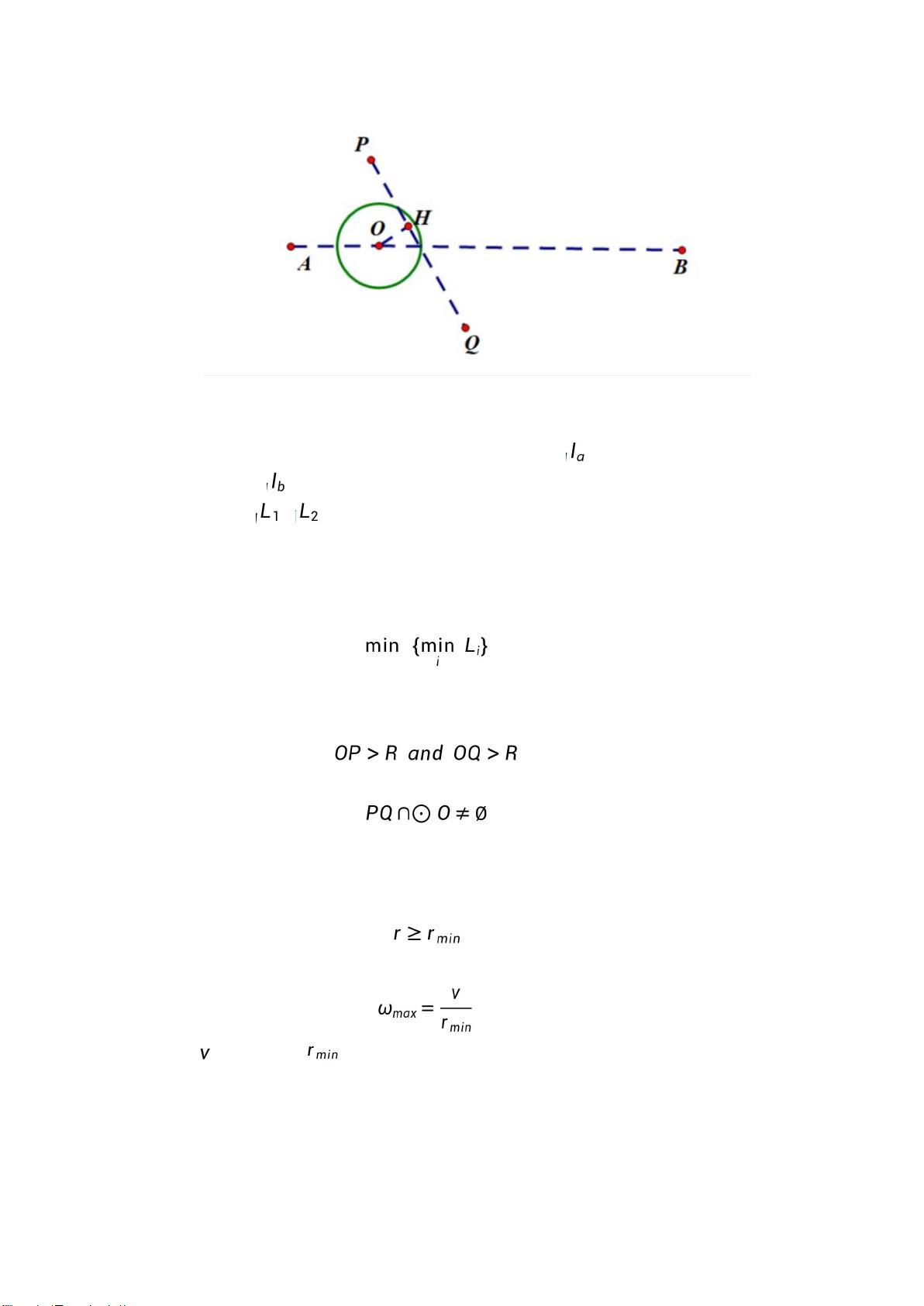
针对首架无人机最短用时问题,本文首先构建了无人机协调避障几何模型,确定了
最小化首架到达无人机航迹长度的目标以及约束条件,考虑到两无人机的位置相互制约,
本文对两无人机的相对位置进行几何上的讨论,得到如下引理:离障碍圆圆心较远站点
出发的无人机无论飞行轨迹如何,在另一站点起飞的无人机总有合适的飞行轨迹使两架
无人机连线始终与障碍圆相交。由此,问题的目标即可转化为不考虑另一架无人机的情
况下,最小化 B 到 A 的航迹长度,再寻找一条与之适配,从 A 到 B 的航迹即可。进一
步地,本文从几何构形上证明了
B
到
A
的最短航迹为两边关于障碍圆的切线段和中间
的一段圆弧,并找到了一条与之适配的另一架无人机的航迹方案,其对应的首架无人机
最短用时为 466.3s.
针对总用时最短问题问题,为了使得整个系统中的总体效率较高,本文采用贪婪的
策略进行动态规划,首先构建了无人机航迹规划的移动模型,确定了无人机较短时间内
直线运动和圆周运动两种运动方式。进一步,考虑到传统贪婪算法的局限性,无法满足
转弯半径的限制,本文构建了人工势场模型进行避障,将无人机所处的环境视为一种虚
拟势场,通过模拟引力与斥力等之间的相互作用来引导无人机的航迹规划。本文构建的
人工势场由三个关键部分组成:目标引力场,障碍圆斥力场,相对位置调节场。目标引
力场体现了无人机与目标点之间的联系,使无人机被目标点吸引;障碍圆斥力场体现了
无人机与障碍圆之间的联系,当无人机靠近障碍圆圆心,斥力会迅速增加,使得无人机
与障碍圆圆心始终保持一段安全距离;相对位置调节场体现了两无人机之间的关系,该
场可以有效调节无人机之间的相对位置,使障碍圆圆心到两者连线的距离被限定在障碍
圆半径以内,当距离接近半径时,该势场会产生较大的回复力。本文将每个时间点三个
势场叠加的作用力方向视运动方向,由于合力变化的连续性,轨迹具有平滑的特点。在
此基础,本文设计了动态规划算法对航迹进行仿真,并通过调参使得结果符合约束条件,
得到两架无人机的飞行轨迹,
A
机耗时
726.2s
,
B
机耗时
546.5s
,两架无人机中后到达
的飞行时间为 726.2s。最后,本文对求解过程中未用到的参数进行了灵敏度分析,验证
了其鲁棒性。
针对不同距离和速度下航迹变动问题,本文在前面两问构建的原模型的基础上进行
分析。对于问题一首架无人机的最优航迹,不同的距离和速度下,总体形态并未发生改
变。对于问题二总用时最短时两无人机的最优航迹,本文通过调节动态规划模型中的参
数求得。随着
OB
长度的增加,机
B
速度的减少,机
B
将绕行更多距离作为代价。同时,
对于每个 OB 长度,存在一个 B 机速度阈值,当 B 机速度小于该阈值,B 机后到达,总
时间受 B 机控制;B 机速度大于该阈值,A 机后到达,总时间受 A 机控制。同时两者航
迹形态发生转换。
关键词:无人机协调避障 几何构形 动态规划 人工势场















- 1
- 2
前往页