FANUC机器人程序实例:工件搬运.docx
版权申诉
19 浏览量
2022-07-11
00:09:52
上传
评论
收藏 50KB DOCX 举报

任意运动
程序实例:工件搬运
直线运动
直线运动
直线运动
夹紧后等待 1 秒
松开后等待 1 秒
→ →
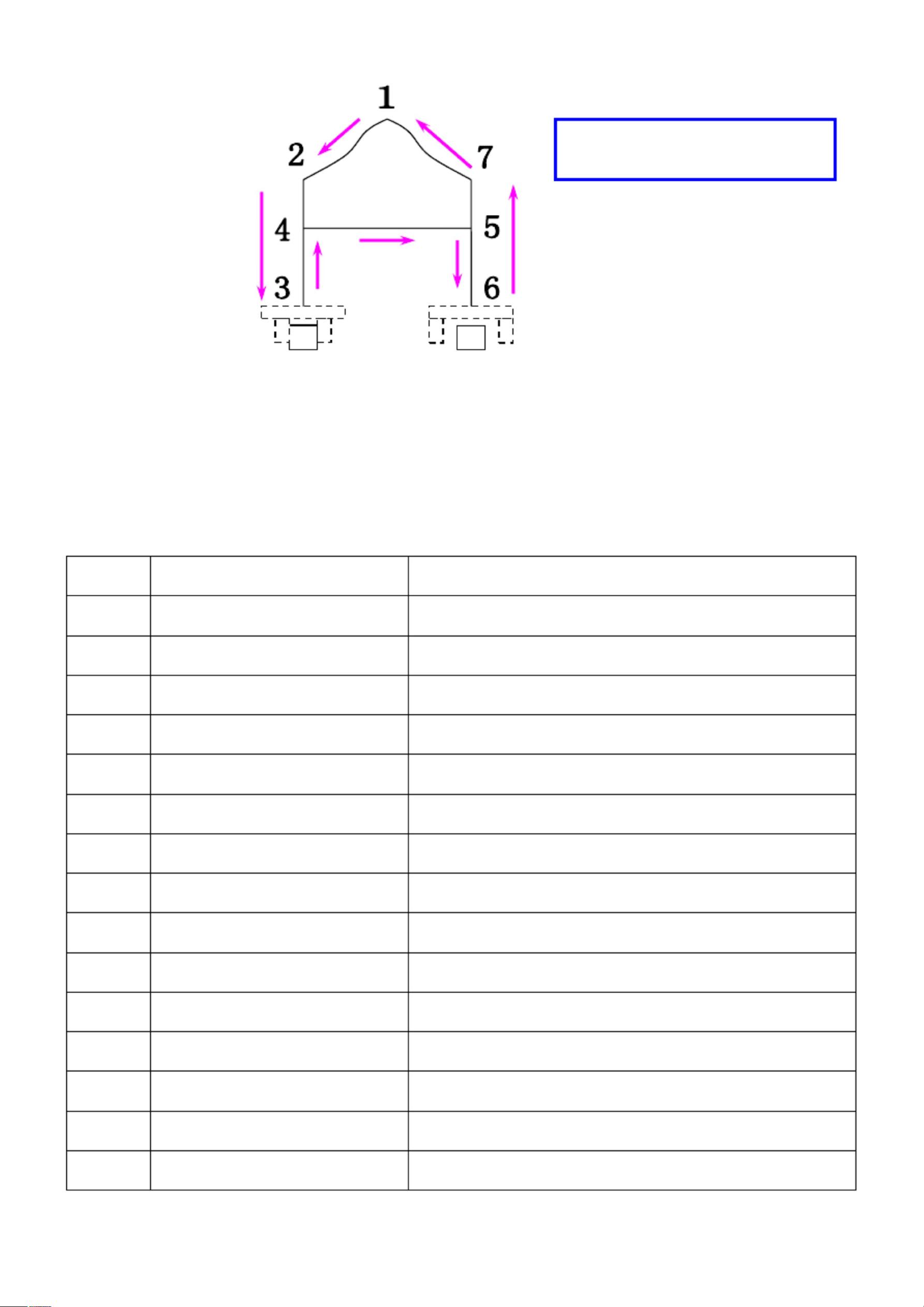
PS:1 2、7 1 为关节关节运动(任意运动);
→ → → → →
2 3、3 4、4 5、5 6、6 7 为直线运动;
7 个位置可以不在同一平面。
程序(示教法:用示教盒控制机器人运动到不指定具体坐标的规定角度和位置):
从其它位置以 100%速度任意运动到位置 1
从位置 1 以 100%速度任意运动到位置 2
在位置 2 气缸松开
L P[3] 1000mm/sec FINE 从位置 2 以 1000 mm/sec 直线运动到位置 3
气缸夹紧后在位置 3 等待 1。0 sec
L P[4] 2000mm/sec FINE 从位置 3 以 2000 mm/sec 直线运动到位置 4
L P[5] 2000mm/sec FINE 从位置 4 以 2000 mm/sec 直线运动到位置 5
L P[6] 1000mm/sec FINE 从位置 5 以 1000 mm/sec 直线运动到位置 6
10
11
12
13
14
[END]
气缸松开后在位置 6 等待 1.0 sec
L P[7]2000mm/sec FINE 从位置 6 以 2000 mm/sec 直线运动到位置 7
RO[1]=OFF
J P[1] 100% FINE
从位置 7 以 100%速度任意运动到位置 1
程序运行结束
资源评论













