
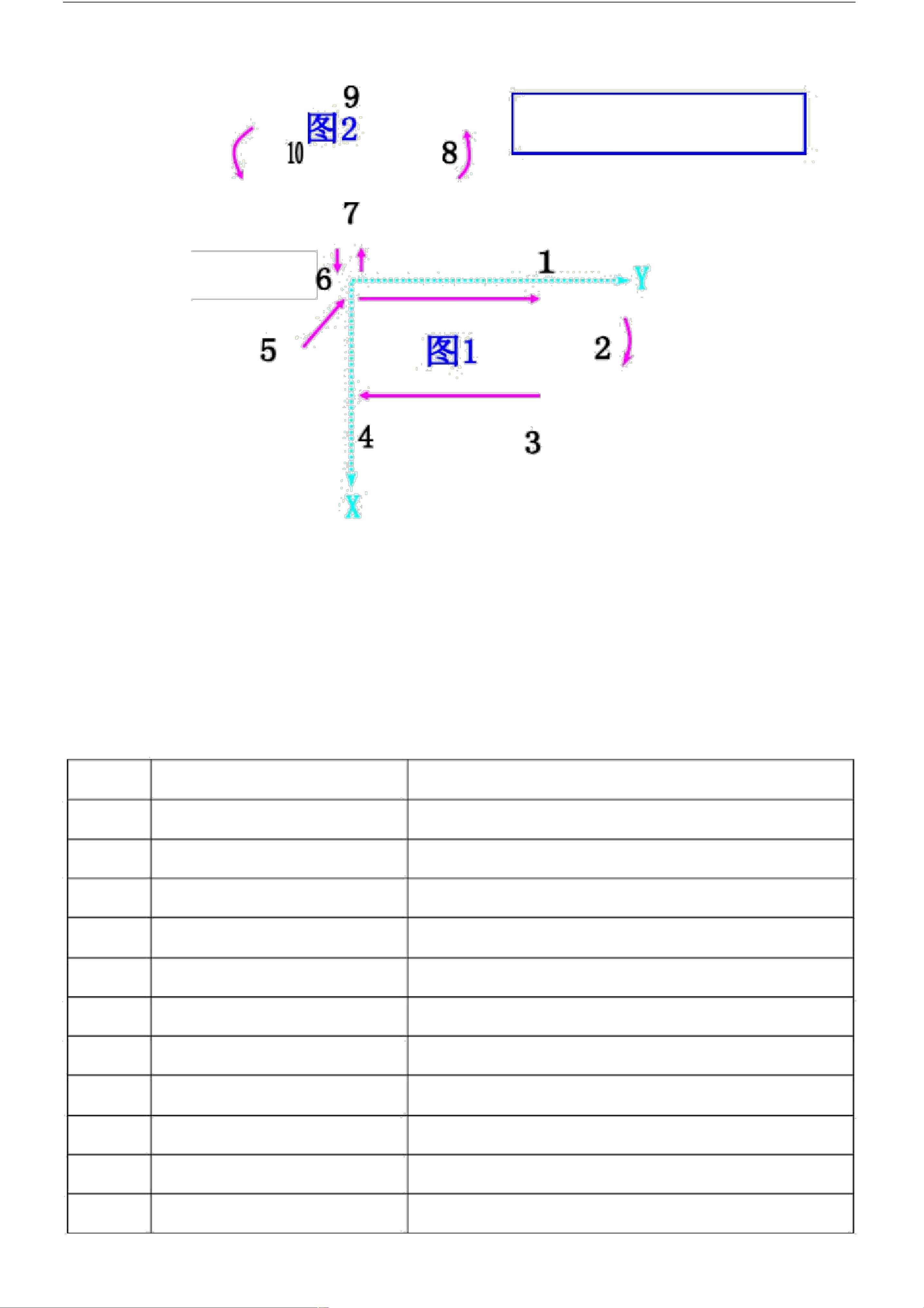
程序实例: 走轨迹
等待秒
PS :1
→
2、2
→
3、7
→
8、8
→
9、9
→
10 、 10
→
7 为圆弧运动;
6
→
1、3
→
4、4
→
5、5
→
6、6
→
7、7
→
6 为直线运动;先画图
1,循环 3 次,等待 3 秒,再画图 2,轨迹如上图所示。
10 个位置在同一平面。
程序( 位置寄存器法:建立坐标系,指定位置具体坐标 ):
程序行
1
2
3
4
5
6
7
8
9
10
11
指令
PR[6]=LPOS
PR[1]=PR[6]
PR[1,2]=PR[6,2]+120
PR[2]=PR[1]
PR[2,1]=PR[1,1]+50
PR[2,2]=PR[1,2]+50
PR[3]=PR[1]
PR[3,1]=PR[1,1]+100
PR[4]=PR[3]
PR[4,2]=PR[3,2] -120
PR[5]=PR[2]
注释
以位置 6 为原点
将位置 6 赋值给位置 1
位置 1:以位置
6
为基准,其 Y 方向 +120
将位置 1 赋值给位置 2
位置 2:以位置
6
为基准,其 Y 方向 +50
位置 2:以位置
6
为基准,其 X 方向 +50
将位置 1 赋值给位置 3
位置 3:以位置
1
为基准,其 X 方向 +100
将位置 3 赋值给位置 4
为基准,其 Y 方向 -
位置 4:以位置
3
120
将位置 2 赋值给位置 5
资源评论


苦茶子12138
- 粉丝: 1w+
- 资源: 7万+









最新资源
- Matlab_Matlab线性算子工具箱.zip
- Matlab_Matlab文件用于各种类型的波束形成.zip
- Matlab_Matlab循环统计工具箱.zip
- Matlab_Matlab中的BP神经网络.zip
- Matlab_Matlab研究工具,读取、写入和处理地震数据.zip
- Matlab_Matlab中的曝光融合.zip
- Matlab_Matlab中的图像视频隐写.zip
- Matlab_Matlab中的图形信号处理.zip
- Matlab_MCMC工具箱的Matlab.zip
- Matlab_Matlab中的遗传算法.zip
- Matlab_MIDI工具箱11 2016是一个分析MIDI文件的Matlab函数集合.zip
- Matlab_MPC的简短例子,特别是随机MPC的SMPC与机会约束的Matlab.zip
- Matlab_NCTOOLBOX一个Matlab工具箱,用于处理常见的数据模型数据集.zip
- Matlab_MTEX是一个免费的Matlab定量纹理分析工具箱主页.zip
- Matlab_PILCO策略搜索框架Matlab版.zip
- Matlab_NIPS 2015论文的Matlab代码和补充材料用于序列建模的深度时序s型信念网络.zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


