





2023/3/22
1
2023/3/22
EPSON机器人-导入及安全培训
RS
目录
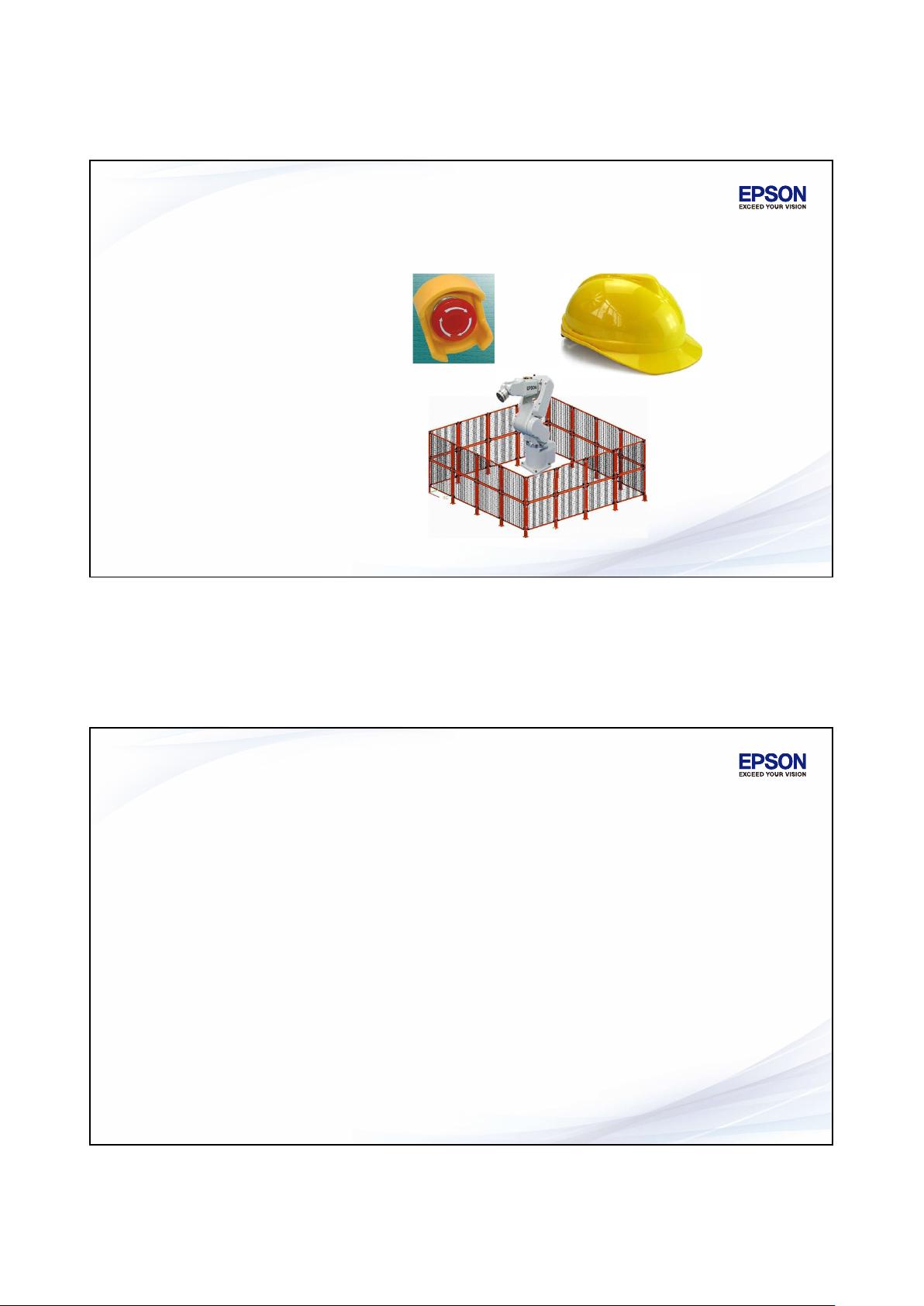
一、关于机器人安全使用
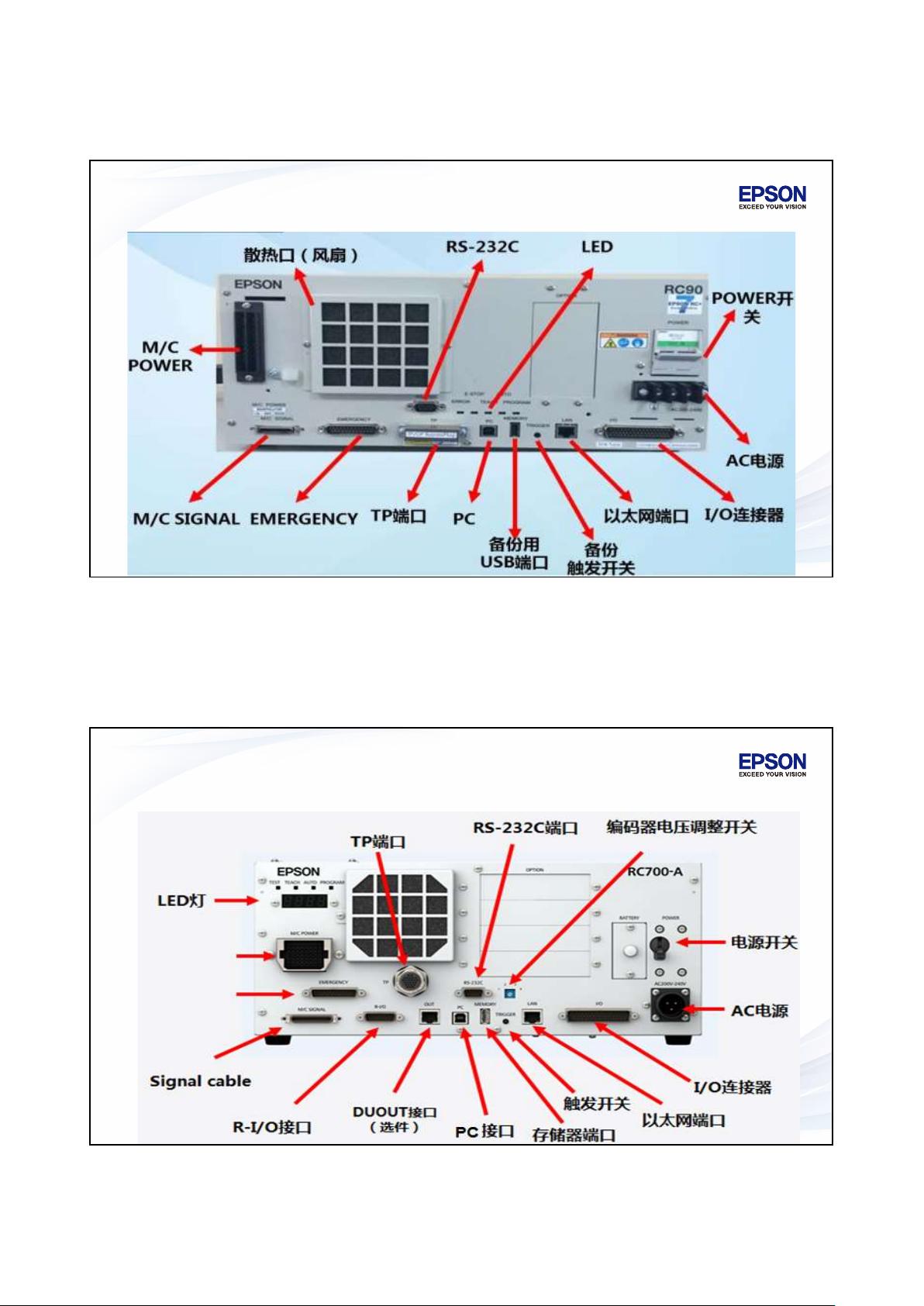
二、硬件基础
三、机器人基础知识
四、软件基础
五、SPEL+语言
六、动作指令
2
七、I/O
八、Pallet
九、!...! 并列处理
十、多任务处理
十一、TCPIP通讯
十二、其他
十三、常见故障处理
1
2
剩余59页未读,继续阅读
资源评论

- #完美解决问题
- #运行顺畅
- #内容详尽
- #全网独家
- #注释完整

山林恩泽
- 粉丝: 78
- 资源: 5









最新资源
- win32汇编环境,窗口程序中复杂列表框的应用举例
- Lattice算法详解:Matlab注释版代码与设计文档全解析,lattice算法matlab注释版代码+设计文档 ,核心关键词:lattice算法; MATLAB注释版代码; 设计文档;,Latti
- MATLAB下的电力系统继电保护与自动重合闸技术研究,MATLAB电力系统继电保护自动重合闸 ,核心关键词:MATLAB; 电力系统; 继电保护; 自动重合闸; 故障处理 ,MATLAB电力系统:继电
- 基于Matlab的电力系统故障仿真分析与模拟研究,基于matlab电力系统故障仿真 ,基于Matlab; 电力系统故障; 仿真,"基于Matlab的电力系统故障仿真分析与研究"
- H桥级联三相逆变器加LCL滤波器:MATLAB 21b下SPWM调制与完美波形输出,H桥级联三相逆变器 加设LCL滤波器,三相负载构成主电路 MATLAB21b版本 采用SPWM调制,可以得到逆变器
- 两化融合助力制药企业数字化转型.pptx
- “源网荷储”大工业微网系统解决方案(27页).pptx
- 三一混凝土设备ERP解决方案(24页 ).pptx
- 数字机关应用创新评估报告数字机关建设的应用场景.pdf
- MATLAB环境下双树复小波在轴承故障诊断及多维信号处理中的应用研究,MATLAB环境下双树复小波基础及在轴承故障诊断中的应用 程序运行环境为MATLAB R2021B,主要演示双树复小波基础及在轴承
- DATEDIF函数是一个用于计算两个日期之间时间间隔的函数
- 从0开始学GEE python-MODIS影像EVI遍历图像集合使用.iterate() 递归函数的分析.pdf
- "基于Matlab GUI界面的动态手势识别系统:多模式图像导入与处理,实现0-9个手势的快速准确识别",标题: 基于Matlab的动态手势识别系统 - 关键词:matlab GUI界面 动态手势识别
- Labview结合Yolov5实例分割:快速推理、灵活调用的ONNXRuntime多模型并行处理库,labview yolov5实例分割onnxruntime推理,封装dll, labview调用d
- 五次多项式换道轨迹:高精度轨迹规划与优化算法应用,五次多项式道轨迹 ,五次多项式换道轨迹; 轨迹规划; 车辆运动控制; 路径规划; 动力学模型,五次多项式换道轨迹:高效、平滑的行驶轨迹规划
- uniapp 安卓sdk 4.5
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈























