一种优化的可拓展激光雷达点云可学习二值量化网络.docx
版权申诉
135 浏览量
2023-02-23
20:39:59
上传
评论
收藏 4.11MB DOCX 举报

摘要
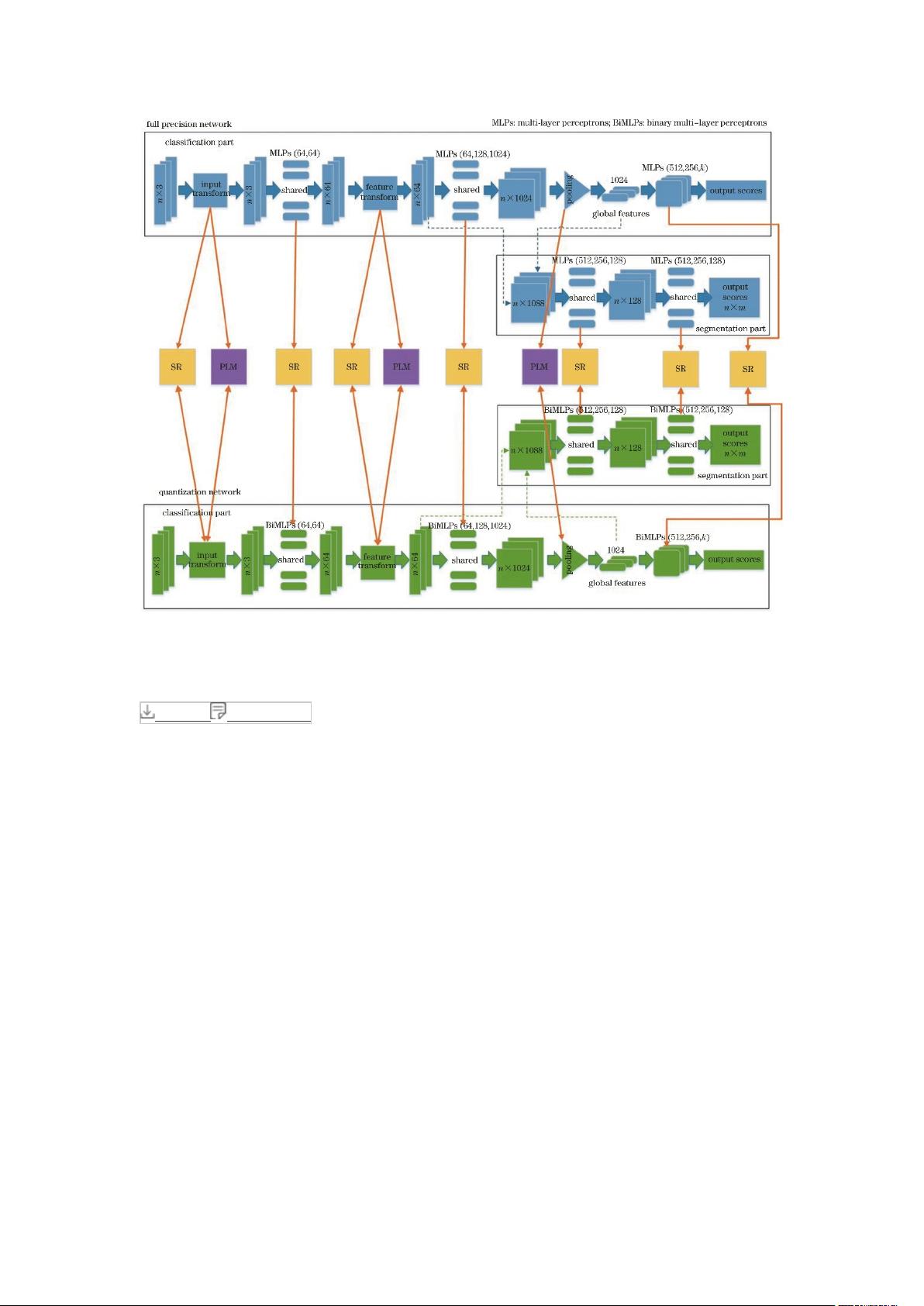
为解决激光雷达点云深度学习网络模型在移动端嵌入式设备部署存在的耗时耗存储问题,提
出了一种激光雷达点云可学习二值量化网络模型。该模型基于特征的知识蒸馏,将全精度网
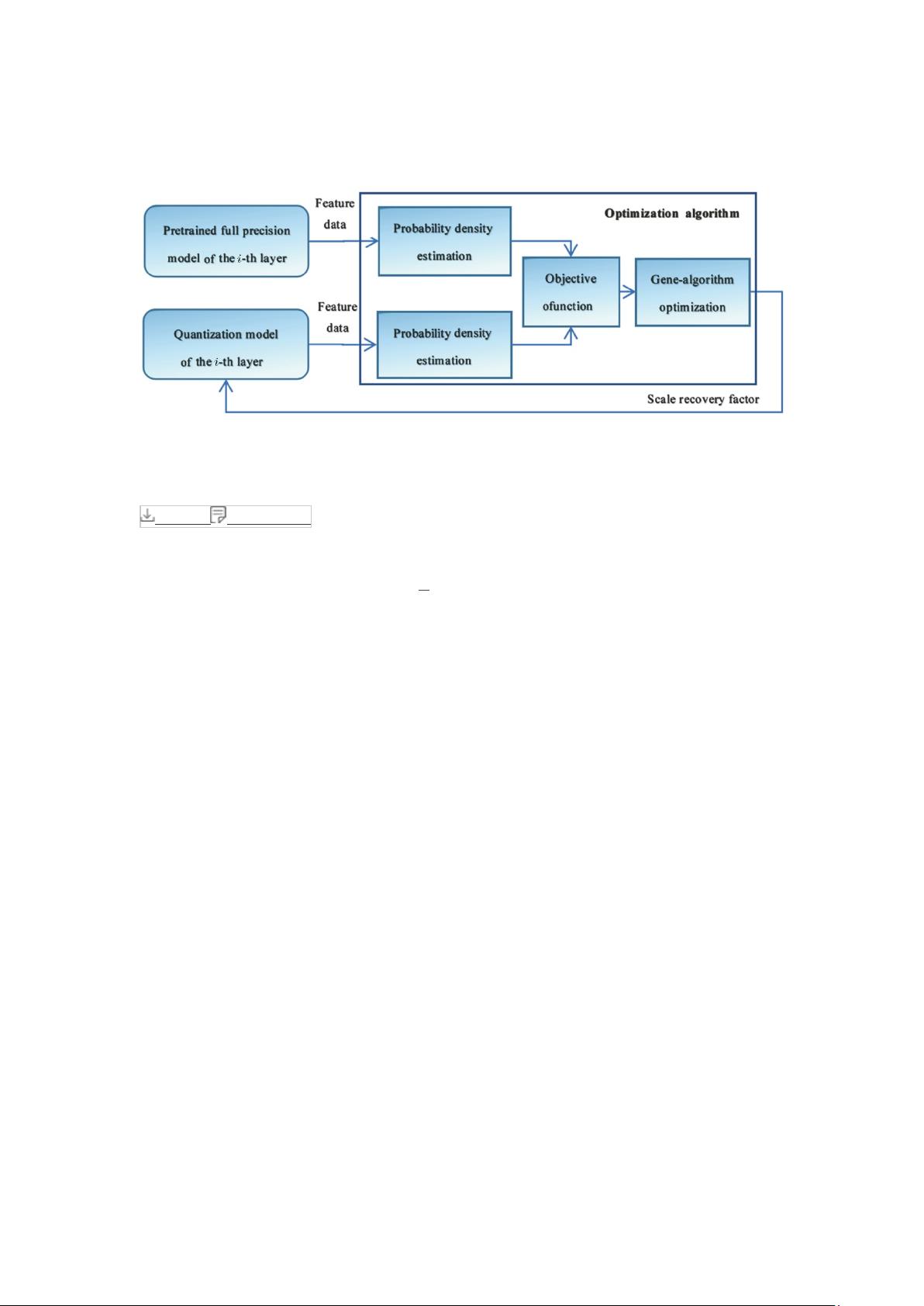
络各层统计特征知识转移到二值量化网络,较大幅度地提升了量化精度;提出基于遗传算法
的二值量化尺度因子恢复可学习优化算法,通过逐层搜索初始最优尺度恢复因子,并通过网
络自学习大幅减少网络参数量;提出一种统计自适应池化损失最小化算法,包括量化网络自
调节和全精度网络转移调节两种方式,以解决量化网络中池化信息损失较大的问题。实验结
果表明,所提算法在获取高精度的同时实现了较大压缩比和加速比,可将 PointNet 大小压缩
为原来的 1/23、加速 35 倍以上,对其他点云主流深度网络具有良好的扩展性。
Abstract
To solve the time-consuming and storage problems of the LiDAR point cloud deep
learning network models in the deployment of embedded devices on the mobile terminal,
a learnable binary quantization network model for LiDAR point clouds is proposed. The
model refers to the idea of feature-based knowledge distillation and transfers the
statistical feature knowledge of each layer of the full-precision network to the binary
quantization network, which greatly improves quantification accuracy. A genetic-algorithm
based learnable optimization algorithm for scale factor recovery of binary quantization is
proposed, which searches for the initial optimal layer-wise scale recovery factor, and
greatly reduces amount of network parameters through network self-learning. A statistical
adaptive pooling loss minimization algorithm is proposed, including quantitative network
self-adjustment and full-precision network transferring adjustment, which solves the
problem of greater pooling information loss of quantitative networks. Experimental results
show that the proposed algorithm achieves larger compression ratio and speedup ratio
while obtaining high precision. Theoretically, it can compress PointNet by 23 times and
accelerate it by 35 times at least or more, and also achieves good scalability for other
mainstream point cloud deep networks.
1 引言
近些年,随着激光雷达在自动驾驶、机器人、智慧城市、增强现实和可穿戴设备等领域的广
泛应用
[1-3]
,基于深度学习的激光雷达点云数据处理受到国内外研究机构和学者的广泛关注
[4-
5]
。包括 PointNet
[6]
、PointNet++
[7]
、PointCNN
[8]
、DGCNN
[9]
和 PointConv
[10]
在内的典型点
云深度神经网络模型的成功应用使得基于深度学习的三维点云处理方法已成为国内外研究
热点。然而,这些点云深度学习网络模型具有庞大的参数规模,与其相伴的计算开销与内存

剩余29页未读,继续阅读
资源评论


罗伯特之技术屋
- 粉丝: 3660
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP











