基于3D点云语义地图表征的智能车定位.docx
版权申诉
29 浏览量
2022-11-28
20:31:44
上传
评论
收藏 682KB DOCX 举报


0. 引言
近些年,“汽车智能化”越来越受到学术界和工业界的关注,其中的高精度定位技术
[1]
是智能车技术的基础和核心。激光雷达
[2]
由于有探测精准、信息量丰富、抗干扰性强等优
点,被广泛应用在智能车定位领域。
基于激光雷达的定位主要分为激光 SLAM
[3]
(simultaneous localization and mapping)和地
图定位
[4]
2 种。Zhang 等
[5]
提出实时建立三维点云地图并基于地图矫正位姿的方法,但该方
法在线建图较耗时且随运动距离增长会产生累积误差。K.Koide 等
[6]
同时融合 GPS,惯性测
量单元和激光雷达进行实时建图和定位,引入了闭环优化策略大大改善了累积误差和定位
高程差问题,但实际中闭环检测和优化非常困难。而地图定位由于地图离线采集、精度高
等优点,目前已经被广泛应用于工程实践和生活当中。
语义地图是通过语义分割建立的地图。S.Thrun 等
[7]
利用投影网格中点的高度差分割地
面,D.Zermas 等
[8]
对分段的地面点云分别利用 RANSAC 分割地面;彭泽民等
[9]
提取标准图
片与待识别图片的垂直、水平方位的灰度分布,通过计算 Pearson 相关系数识别交通标志
牌;李游
[10]
对体素化后的数据进行垂直连续性分析,同时结合自适应圆柱模型的方法分割
杆状物。这些单一方法都存在欠分割和使用场景单一的缺点。
利用语义地图
[11]
对智能车定位意义重大。R.Dube 等
[12]
将分割的语义目标直接匹配实现
场景识别,但分割目标包括车辆等静态物体,影响后续定位。Liu 等
[13]
利用语义地图中各
语义目标的拓扑关联信息实现场景识别,但单一的拓扑信息不能很好地表征场景。Chen 等
[14]
使用深度学习剔除动态语义目标以实现静态语义地图的构建和智能车定位,但深度学习
方法存在参数多、训练量大的缺点。基于地图的智能车定位分为节点级定位和度量级定位
2 个部分,本文主要研究基于地图的节点级定位。
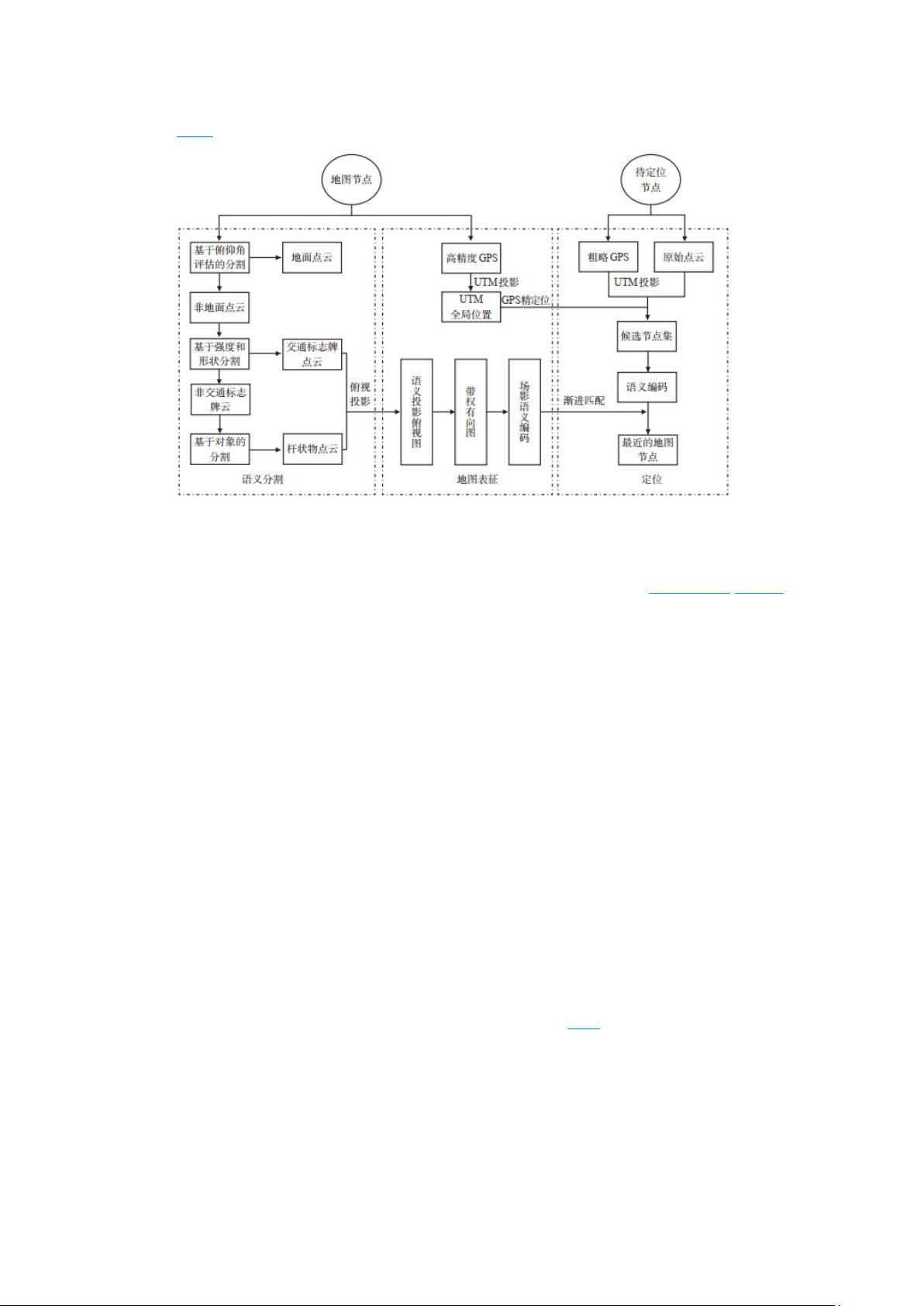
本文提出了 1 种基于 3D 点云语义地图表征的智能车定位方法,分为语义分割、地图
表征、定位 3 个部分。分割的语义目标由地面、交通标志牌、杆状物组成;地图表征模型
由一系列位置节点组成,各位置节点由语义编码和高精度全局位置共同表征,其中语义编
码的生成先后经过语义俯视投影、带权有向图生成、语义路生成和语义路编码 4 个过程,
高精度全局位置由高精度惯导的数据表征;定位时,首先利用地图节点的全局位置进行
GPS 粗定位,然后采用语义编码渐进匹配的策略完成节点级定位,最后完成整个智能车定
位过程。
1. 本文算法
1.1 系统概述
剩余17页未读,继续阅读
资源评论


罗伯特之技术屋
- 粉丝: 3907
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP











