一种基于双层框架的仿射类图像抠像方法.docx
版权申诉
68 浏览量
2023-02-23
20:15:30
上传
评论
收藏 1.09MB DOCX 举报

数字图像的抠像与合成问题是在虚拟现实中图像处理领域的两种经典问题, 目的是从
一幅合成图像中将前景物体从背景中分离出来, 并合成到一幅新背景图像中.对于合成问题,
对于在数字图像 II 中的某个位置 i=(x,y)i=(x,y), 给定前景图像的颜色 FiFi、背景图像颜色
BiBi 以及一个透明度标量 αi∈[0,1]αi∈[0,1], 其观察到的颜色 IiIi 能够用如下抠像公式表示
为
Ii=αiFi+(1−αi)BiIi=αiFi+(1−αi)Bi
(1)
如果 αi=0αi=0 或 αi=1αi=1, 将点 ii 称作绝对前景或者绝对背景, 并统称为绝对像素.
对于其余 0<αi<10<αi<1 的点, 称为混合像素.
抠像问题为合成问题的逆问题, 同时也是欠约束问题:给出各点的合成像素 IiIi, 需要求
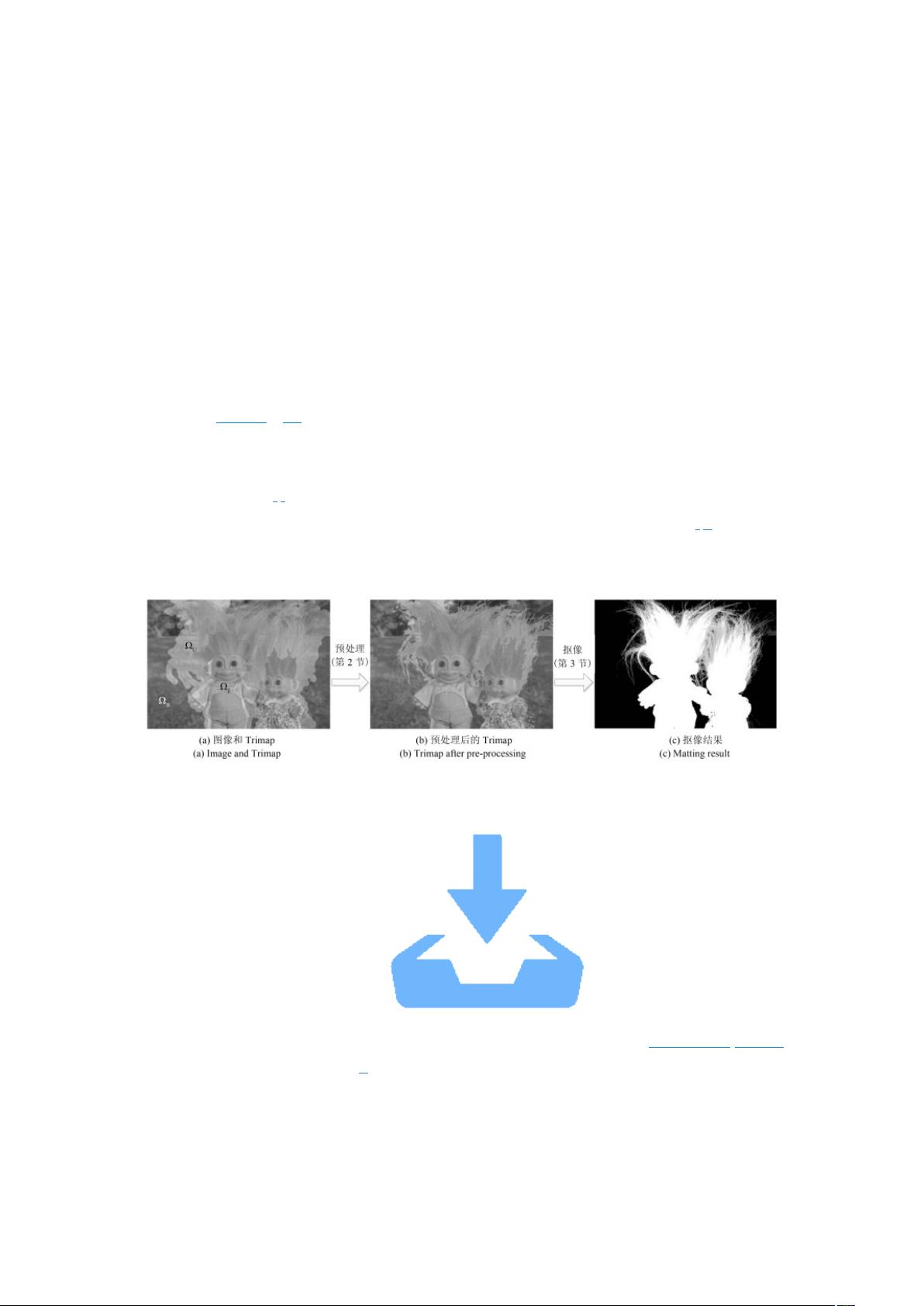
出未知量 FiFi、BiBi 与 αiαi.很多一般背景抠像问题都需要用户提供手工输入的辅助三分图
Trimap, 如图 1(a)和(b)所示, 它包括已知绝对前景区域 ΩFΩF 和已知绝对背景区域 ΩBΩB,
剩余部分为未知区域.于是, 依据已知像素, 并根据抠像公式及某些先验条件, 可以估计未知
区域内的每个像素的{F,α}{F,α}值.基于 Trimap 的图像抠像算法通常分为如下 2 种方式: 1)基
于仿射的抠像方法
[1-7]
.该方法并不孤立地计算每个点, 而是考虑像素间的相关性, 利用间
接、迭代的方式递归地求出未知区域中各个点的 αα 值. 2)基于采样的抠像方法
[8-17]
.该方法
对每个未知点独立从已知区域中选取样本, 并采用逐对样本的计算方式, 而并不考虑各个像
素之间的联系.
图 1 图像抠像问题的基本输入输出和本文的双层次抠像结构
Fig. 1 Input and output of image matting and the hierarchical framework of our method
下载: 全尺寸图片 幻灯片
本文主要讨论仿射类方法
[18]
.虽然相比仿射类方法, 采样类方法的采样位置和采样方式
变化较多, 而且获取样本方式非常直接, 然而, 仿射类方法具有以下优势. 1)仿射类方法充
分强调了像素间的相关性, 该方式也可视为由已知区域向未知区域缓慢、渐进的计算, 因此
在最终 αα 结果的平滑性以及带给或用户的视觉感受上要明显好于采样类方法. 2)采用远距
离搜索的仿射类方法对绝对点的计算效果较好, 而在事实上, 未知区域内的大多数点为绝对

剩余24页未读,继续阅读
资源评论


罗伯特之技术屋
- 粉丝: 3548
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
- kernel-ml-6.8.8-1.el7.elrepo.x86-64.rpm
- Labview基本框架之状态机
- HM2309B-VB一款P-Channel沟道SOT23的MOSFET晶体管参数介绍与应用说明
- Git安全实践:保护你的代码仓库个人学习笔记.md
- 自动驾驶定位系列教程九:后端优化.pdf
- 三国志5威力加强版-windows
- HM2309A-VB一款P-Channel沟道SOT23的MOSFET晶体管参数介绍与应用说明
- HM2306-VB一款N-Channel沟道SOT23的MOSFET晶体管参数介绍与应用说明
- Git进阶技巧:提升团队协作效率个人学习笔记.md
- 自动驾驶定位系列教程八:建图系统结构优化.pdf
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


