多水下机器人自航纵向编队的操纵运动数值模拟.docx
版权申诉
112 浏览量
2023-02-23
19:59:09
上传
评论
收藏 1.81MB DOCX 举报


多水下机器人(autonomous underwater vehicles, AUVs)相对单体 AUV 具有高效率、鲁棒
性好等优点,可以分布于广阔水域进行海洋环境调查,水下目标搜寻和水下信息组网等广泛作
业
[1-3]
。多 AUV 的流场干扰是多 AUV 系统协作的一个基本问题,是多 AUV 近距离协同作业或
AUV 接近障碍物过程中的控制和避碰的前提
[4-5]
,探究多体干扰的流场内在规律,有助于避免多
体之间的不利干扰,提高多 AUV 系统的安全性;利用多体之间的有利干扰,提高能源的有效
应用
[6-7]
。目前国内外针对椭球体、圆柱体、不带附体的梭形体、带舵翼的鱼雷型载体、带舵翼
和桨模块的 AUV 模型的编队运动进行了研究。
庞永杰等
[8]
采用面元法计算了水下 2 个椭球体相互接近过程中水动力系数随物体间距的变
化。于定勇等
[9]
用数值方法分析并列双圆柱体的尺寸,间距对圆柱漩涡脱落,升力和阻力等的
影响关系。周杰等
[10]
采用粒子图像测速仪(PIV)研究了不同间距比的串列双圆柱的绕流现象。
Zhang 等
[11]
对大小不同的 2 个鱼雷型体 AUV 的不带舵翼,带舵翼 2 种情况下的纵向、横向不
同间距,带漂角和距水面不同距离的拖曳运动的定常流场进行了探讨,从降低阻力和安全性 2
个角度提出了有效编队方式。Muhamad
[12]
对不带舵翼的鱼雷型载体展开 2 个 AUV 的纵向编
队,3 个 AUV 的梯形编队下的 AUV 阻力性能研究。Randeni 等
[13]
采用动网格技术研究了不带
附体的 AUV 在一个大水下机器人侧面做简谐振荡前进过程中的纵向力、横移力和回转力矩变
化。以上研究都是基于简单形状、不带附体、不带螺旋桨的模型,庞永杰等
[14]
通过垂直型平面
运动机构对无桨和带桨全附体潜艇模型完成拘束模型试验,表明带桨模型的水动力系数与无桨
模型有较大的差距,螺旋桨的存在对潜艇的运动有一定的影响。Rattanasiri 等
[15]
通过采用体积
力法模拟虚拟螺旋桨的作用,研究了双椭球体带虚拟螺旋桨的纵向、横向不同间距的自航编队
过程中的水动力变化,结果表明带螺旋桨的自航编队和不带桨的拖曳编队产生的能耗损失不
同;不同间距、不同布置形式会导致不同领航者和追随者不同的能耗。以上关于编队的数值模
拟都是基于简单模型、拖曳编队,与真实载体的自航编队运动有较大的差距。
本文基于前期 AUV 带离散螺旋桨的自航数值模拟的基础
[16-17]
,采用类物理数值模拟方
法,对双 AUV 带离散螺旋桨旋转推进 AUV 航行的编队(简称“自航编队”,AUV 不带螺旋桨的拖
曳运动编队简称为“拖曳编队”)的非定常运动响应进行实时模拟。从阻力、推力、速度、间距和
能耗的动态变化以及流场的瞬时特性,分析 AUV 自航编队耦合流场的干扰作用过程,为双
AUV 编队的安全性和能耗评估提供参考。
1. 数值模拟方法和求解设置
1.1 几何模型
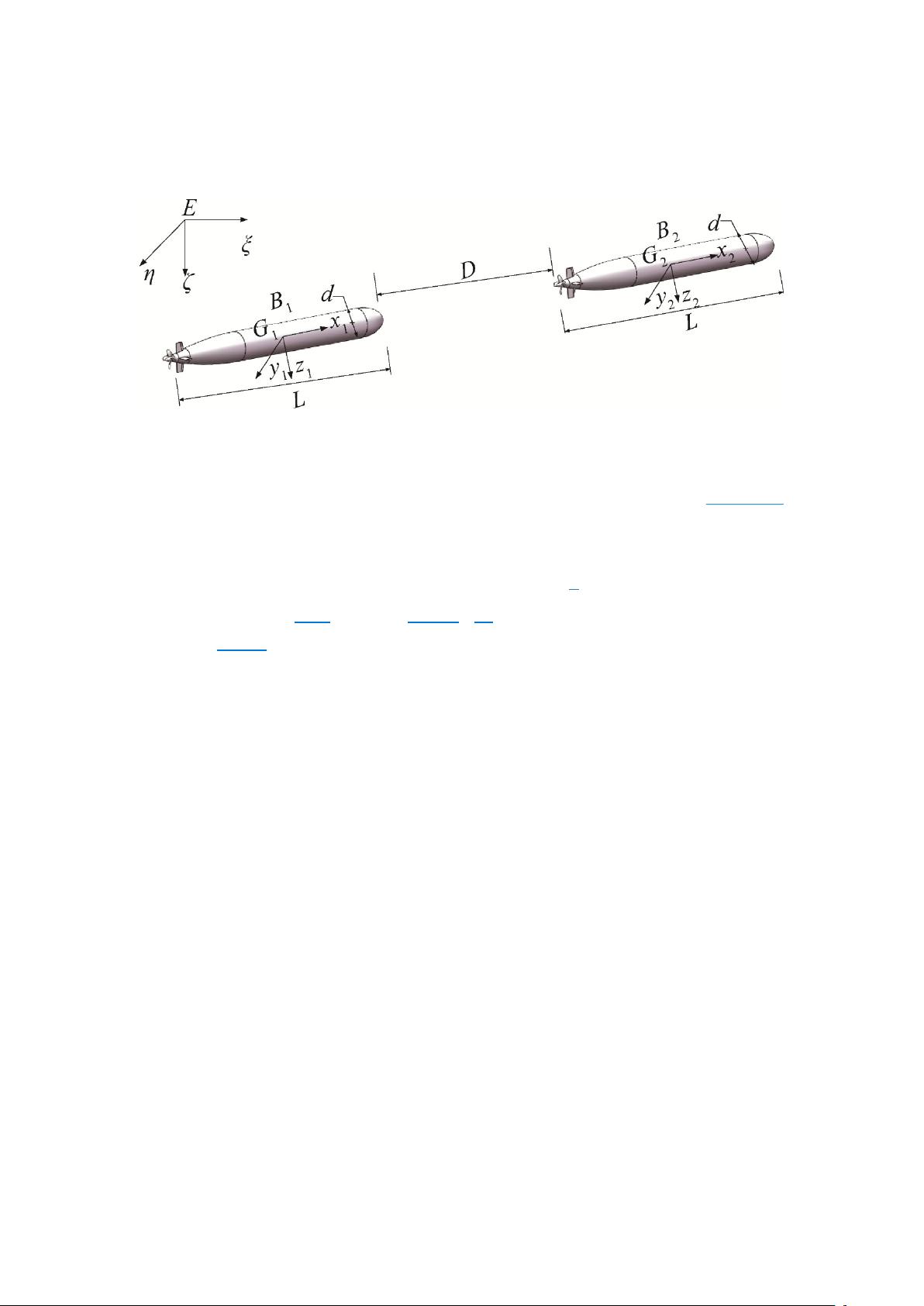
研究中的串行编队 AUV 采用等大小 AUV, 其形体采用改进型 REMUS AUV,长 L=1.74
m,直径 d=0.191 m,艉部布置“十”字形舵翼和一个 MAU4-40 螺旋桨。如图 1 所示,在纵向
编队中,前后 AUV 分别为 B
2
和 B
1
, 纵向间距为 D。几何模型中按照右手法则建立大地坐标系
E-ξηζ 和载体坐标系 G
1
-x
1
y
1
z
1
,G
2
-x
2
y
2
z
2
。其中 Eξ 指向 AUV 直航方向,Eζ 垂直指向地心。
G
1
和 G
2
分别对应 AUV B
1
和 AUV B
2
的浮心。G
1
x
1
和 G
2
x
2
分别为 AUV B
1
和 AUV B
2
纵对称
剩余12页未读,继续阅读
资源评论


罗伯特之技术屋
- 粉丝: 3543
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
- 基于matlab开发的全面详解LTE:MATLAB建模、仿真与实现-simulink.rar
- 自动驾驶定位系列教程二:系统架构.pdf
- 整站程序8优技巧网-8ujq.rar
- 世界各个国家或地区国际域名缩写
- 基于matlab开发的根据rvm回归模型自己编的matlab程序.rar
- 基于matlab开发的该程序为国内一所大学编写的LTE链路层仿真程序,根据LTE标准协议编写的,很容易看懂.rar
- 高效C++学生成绩管理系统:教育技术+C++17编程+数据管理+教务自动化
- 搜索链接要广告分类系统 v2.0-yad20.rar
- 基于matlab开发的Tipping的相关向量机RVM的回归MATLAB程序,有英文注释,可以运行.rar
- 一个点击正反转程序实例,可实现案件电机正反转
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


