红外相机实时绝对辐射定标技术研究.docx
版权申诉
58 浏览量
2023-02-23
16:46:17
上传
评论
收藏 744KB DOCX 举报

0. 引 言
辐射定标技术将图像灰度值转换成绝对辐射亮度,是实现定量遥感的关键环节。在轨
红外遥感探测系统的辐射定标主要包含:探测器响应的不均匀性校正(相对辐射定标)和建
立遥感相机输出信号值与输入辐射量的函数关系(绝对辐射定标)。前者是辐射定标的中间
环节,后者是辐射定标的最终目标
[1]
。
目前常用的辐射定标方法包括:(1) 利用自然辐射源、黑体定标源、定标灯以及太
阳光漫反射板等星载定标设备对红外相机进行定标;(2) 以地物作为定标源的场地定标
[2]
;(3) 利用已定标且精度较高的参考红外相机对目标红外相机进行交叉定标
[3]
。
传统红外相机一般采用扫描方式成像,可以实现星上实时定标。与传统红外相机相
比,文中研究的红外相机(以下统称该相机)分辨率高、口径大,难以实现星上实时定
标。同时,由于该红外相机无法观测冷空间,传统的利用单个定标场和冷空间的场地绝对
辐射定标方法也不适用,且由于空间分辨率高,对定标场的辐射均匀性要求更高。因此,
针对上述该红外相机的限制问题,文中设计合理的辐射定标方案,充分利用实验数据,实
现了实时高精度绝对辐射定标,为后续的温度反演和定量化应用奠定了基础,具有一定的
现实意义。
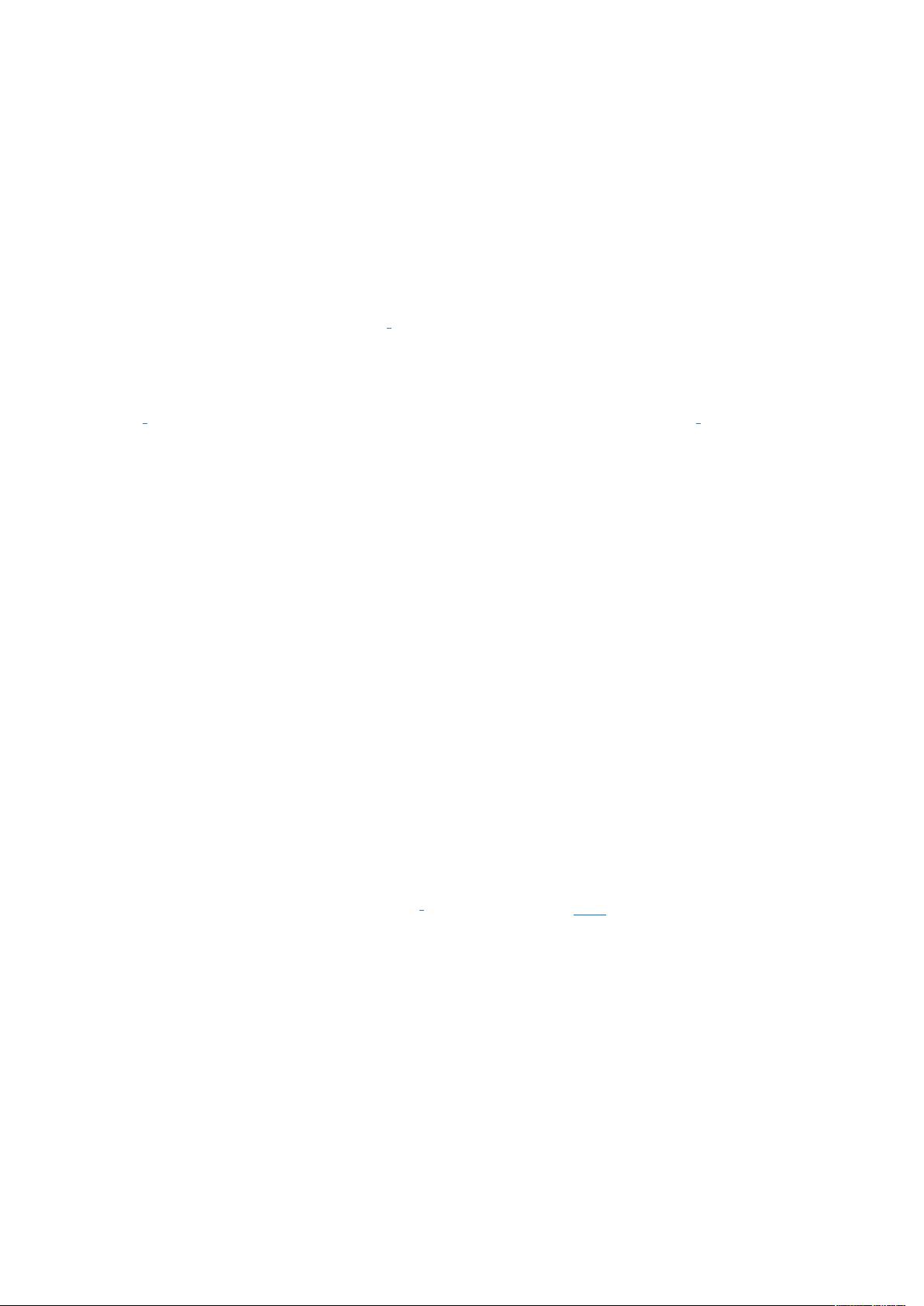
1. 红外相机辐射定标设计与实现
针对红外相机半光路星上定标的特点,完成了星上定标数据处理和分析,生成噪声等
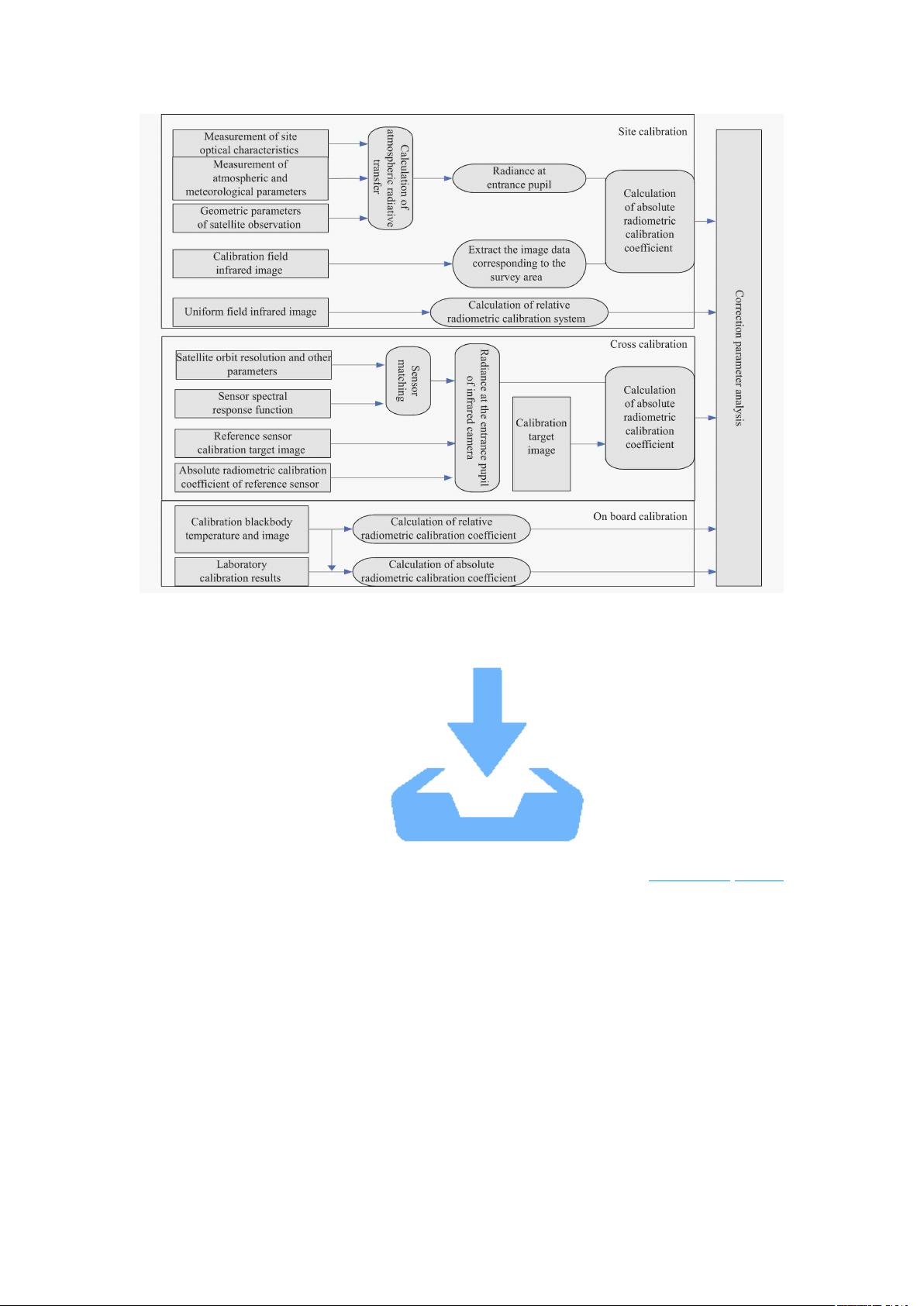
效温差、相对和绝对辐射定标系数;针对红外相机不能观测冷空间的特点,完成了场地定
标方案设计,在卫星在轨测试期间开展了场地定标外场试验,利用定标场地红外图像和同
步测量数据,生成场地相对和绝对辐射定标系数;针对红外相机宽谱段、高分辨率的特
点,完成了交叉定标方案设计,通过参考传感器选择和光谱匹配,完成了交叉定标数据处
理和分析,生成交叉绝对辐射定标系数
[4]
。红外定标总体流程图 1 所示。


剩余25页未读,继续阅读
资源评论


罗伯特之技术屋
- 粉丝: 3654
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
- 本科毕业设计基于C# wpf人脸识别的考勤系统的设计与实现源码.zip
- 基于Ruoyi+uniapp实现学生考勤系统 学生考勤源码+项目说明.zip
- feae6bc968ca68a099455d8b8a8dea35
- 基于Pytorch训练CIRAR10上分类算法.zip
- Pytorch-pytorch深度学习教程之Tensorboard.zip
- 基于C++和Python开发yolov8-face作为人脸检测器dlib作为人脸识别器的人脸考勤系统源码+项目说明.zip
- Pytorch-pytorch深度学习教程之变分自动编码器.zip
- Pytorch-pytorch深度学习教程之神经风格迁移.zip
- Pytorch-pytorch深度学习教程之深度残差网络.zip
- Pytorch-pytorch深度学习教程之循环神经网络.zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


