

0. 引 言
二维成像技术在成像过程中丢失深度信息,三维成像技术的出现无疑是成像领域的重
大突破,通过记录场景深度信息使人们更直观地获取视觉信息。全光三维成像技术是计算
成像的重要研究方向,它将光学设计、光学原理与计算处理相结合,在一定程度上突破了
传统光学设计的技术壁垒
[1-2]
。与传统的相机相比,全光相机在主物镜和探测器之间加入微
透镜阵列(Micro Lens Array,MLA),只需一次拍摄即可获取位置信息和角度信息,通过
分析不同视角图像之间的视差信息即可获得完整场景的三维点云数据,这为场景深度测量
提供了数据基础
[3-7]
。
光场三维成像技术主要应用于目标识别、地形匹配、环境态势感知、工件检测、视觉
SLAM 以及城市数字化等领域。目前,全光相机三维成像技术主要应用于近距离场景,例
如:生物医疗、高端工业检测以及粒子追踪等,而远距离三维成像的相关应用却少之又少
[8]
。同时,基于全光相机的三维成像技术是集前端光学系统与后端信息处理为一体的计算
成像技术,目前对全光相机后端处理算法的研究颇多
[2,6,9-13]
,对前端光学系统的研究鲜有报
道。文中对前端光学系统设计进行研究,建立全光相机深度分辨率模型,分析前端光学系
统光学性能对全光相机深度分辨率的影响,确定前端光学系统设计指标;分析两反光学系
统各参数的影响,确定全光相机主物镜光学系统的初始结构,最后完成可应用于亚公里级
三维成像的全光相机主物镜设计,该设计易于加工制造,可在 110 ℃温度带宽下良好成
像。
1. 基本原理
1.1 全光相机成像模型
全光相机主要包括主物镜、微透镜阵列以及探测器
[8]
,其可以分为非聚焦型和聚焦型
两种基本形式。相较于非聚焦型全光相机,聚焦型全光相机拥有更高的空间分辨率,因此
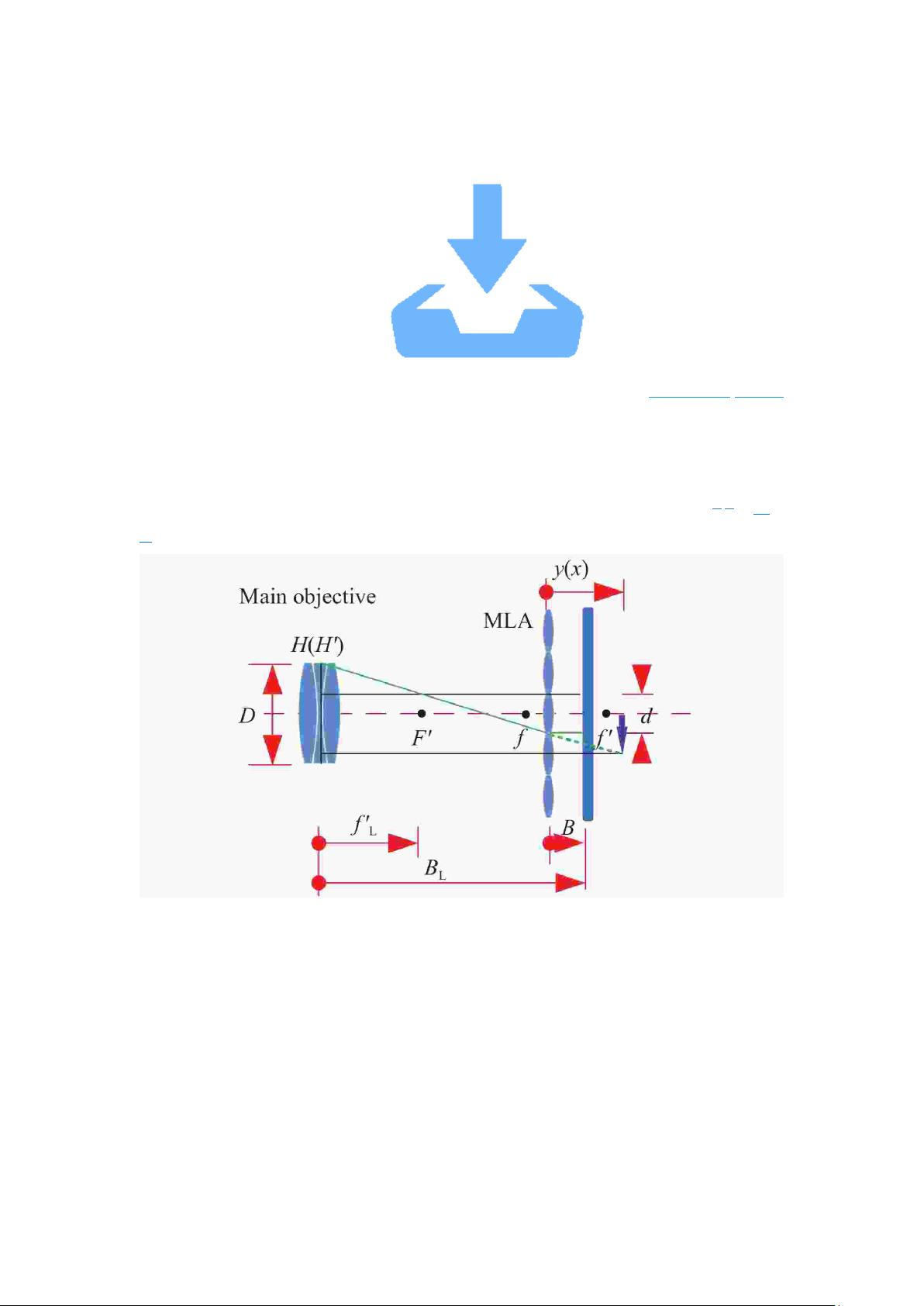
文中选择聚焦型全光相机进行讨论。图 1 所示为聚焦型全光相机的两种基本结构形式,场
景中的物体经过主物镜成像在中间像面上,中间像面的物体经不同的微透镜单元在探测器
的不同位置成像,即可完成位置信息和方向信息的记录。与开普勒结构全光相机相比,伽
利略结构聚焦型全光相机可以将“近景变远,远景变近”,通过牺牲近端深度分辨率实现远
端深度分辨率的提升。因此,文中选择伽利略结构形式进行研究。
剩余12页未读,继续阅读
资源评论


罗伯特之技术屋
- 粉丝: 4289
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


