辅助虚拟现实数据手套及电刺激力触觉增强反馈电路系统设计.docx
版权申诉
100 浏览量
2022-07-14
11:23:44
上传
评论 1
收藏 1.45MB DOCX 举报


手势姿态识别是虚拟现实(Virtual Reality,VR)领域中非常关键的一种交互
方式。不同的实现方式和设备都会使用户得到不同的体验。近年来,随着 VR 设
备受欢迎度的提高和人机交互(Human-Computer Interaction,HCI)
[1]
科学的不
断发展,手势交互成为最符合人们习惯的交互方式。但手势交互研究相较听觉、
视觉的交互方式还有较大的差距
[2]
,这主要是由人手的灵巧性、复杂的皮肤形状
和传感器的复杂性造成的。
目前手势姿态识别的方式还分为基于视觉和非视觉两种
[3,4]
。基于视觉的数
据采集方式主要是采用摄像头对手部动作进行捕捉,目前比较常见的动作捕捉
设备主要有微软公司的 Kinect
[5]
、索尼公司的 PS move 以及 Leap 公司的 Leap
motion
[6]
和上海理工大学黄东方的基于改进 ND-DTW 算法的动态手势识别
[7]
,这
些均为基于图像处理的方式,对肢体动作的识别较为准确。但上述方法对检测
细小位置的手指运动有一定难度,当识别物体的运动速度过快时会出现图像丢
帧的问题。另外,国内的手势交互方式主要集中在如何实现手指姿态的判别上,
尚未出现功能性电刺激手势交互设备。秦欢欢等人设计了采用双手力触觉反馈
的人机交互系统
[8]
。该系统中,双手的位置跟踪精度达到 0.8 mm 并可以给手提
供 20 N 和 0.4 N·m 的力触觉反馈。但该设备尺寸较大不利于个人用户使用,且
存在不便移动的缺点。在力触觉反馈方面,国外有 CyberGlove 公司使用磁流变
液智能材料构建的力反馈数据手套
[9]
,该系统在设计尺寸上比东南大学的小很
多,但是在设备重量上依旧没有得到很好地改善。
相比基于视觉识别的方式,本文设计使用基于非视觉的数据手套采集方式
不会出现上述识别精度有偏差的现象,同时也不会出现识别物体脱离识别范围
的 情 况 。 在 进 行 力 触 觉 的 辅 助 反 馈 上 ,前 期已 经实 现通 过调 节功 能性 电刺 激
(Functional Electrical Stimulation,FES)产生的刺激脉冲信号强度来控制不同
的手部力量
[10,11,12,13]
。本文中使用该设备来解决力触觉反馈的问题,不仅可以使
VR 设备完成手 势识别,还能通过功能性 电刺激腕带完成虚 拟现实中的力触觉
增强反馈。
1 系统 与方 法
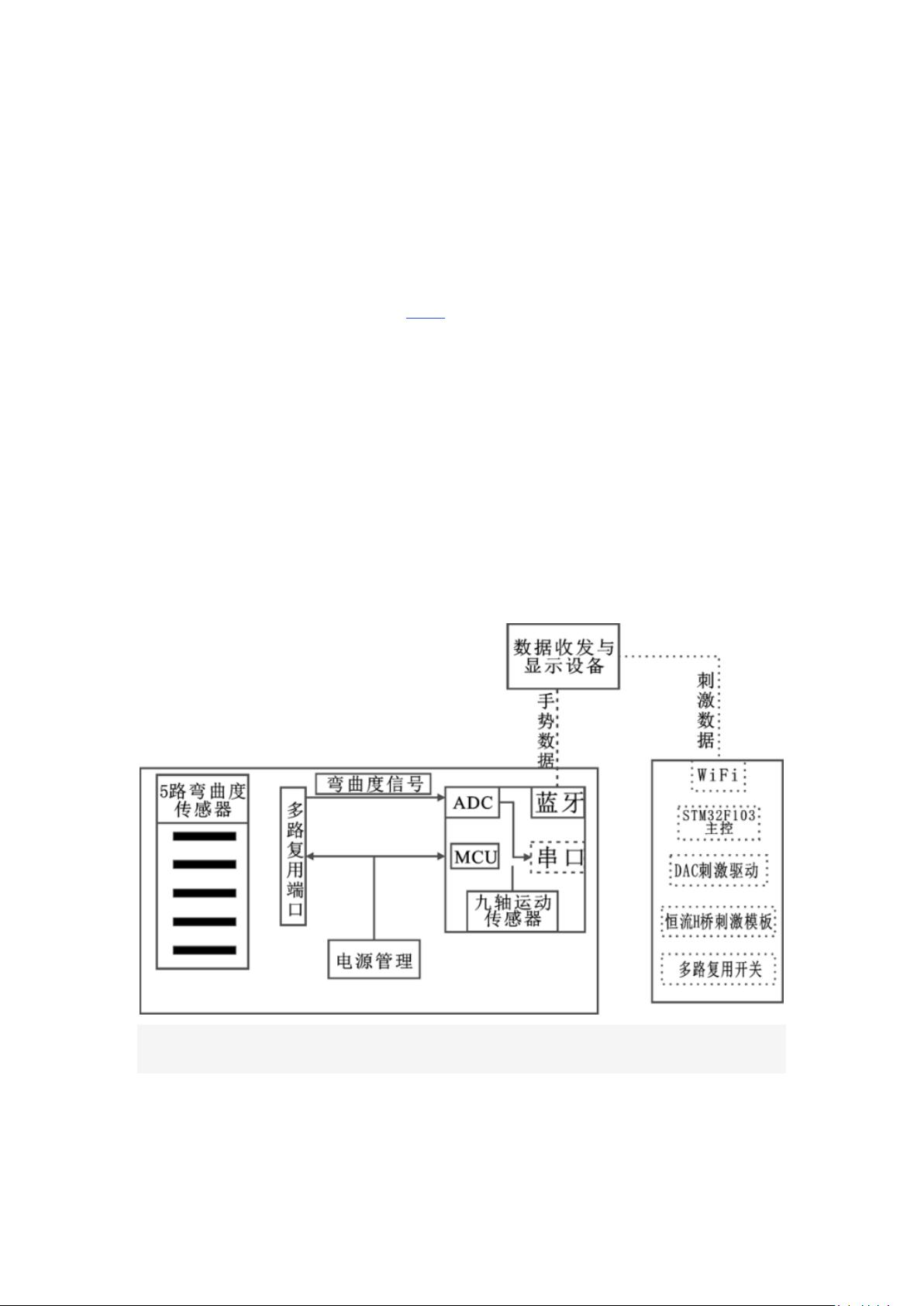
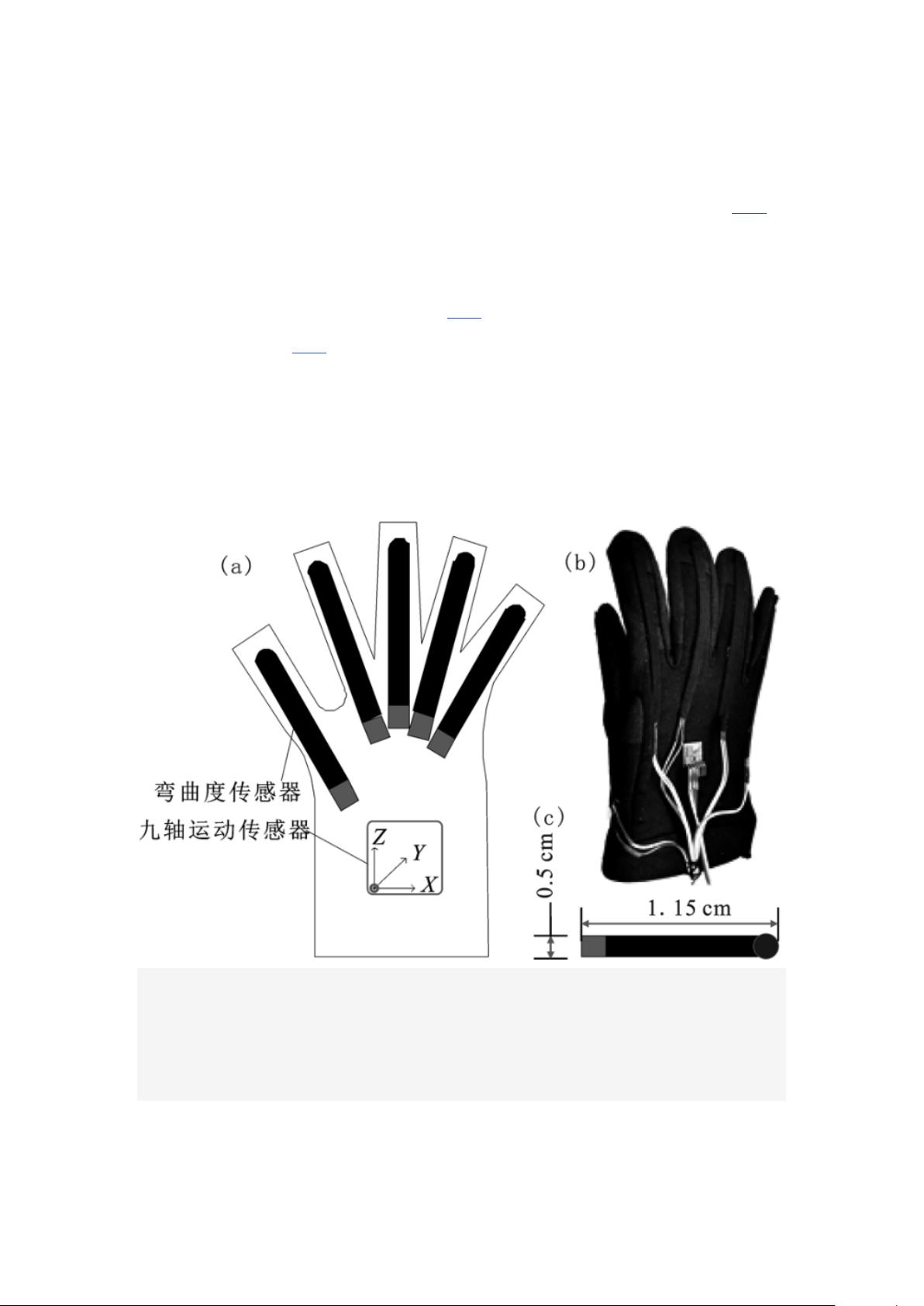
1.1 原型系统整体 设 计
针对 VR 使用者开发的手势交互识别系统,一套辅助虚拟现实数据手套及
电刺激力触觉增强反馈系统需要解决以下问题:(1)使用者双手位置和姿态的精
剩余19页未读,继续阅读
资源评论


罗伯特之技术屋
- 粉丝: 3663
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP











