基于图像和IMU传感器的生物行为分析系统设计.docx
版权申诉
9 浏览量
2022-07-13
17:14:27
上传
评论
收藏 611KB DOCX 举报

近年来,随着计算机图像采集与处理技术的进步,各种监测装置的研发发展
迅速。随着视频、图像采集与监测分辨率不断提高,可利用现有检测设备进行
生物简单活动的检测跟踪,并捕获微小体态变化。在实验室中,基于数字图像处
理获取生物行为参数是目前生物行为研究中的热点。行为参数是实验生物行为
分析的关键评价指标
[1]
。目前基于数字图像处理的生物行为分析方法主要有基
于阈值分割的生物行为分析方法、基于背景差分的生物行为分析方法、基于
Meanshift 跟 踪 的 生 物 行 为 分 析 方 法 和 基 于 深 度 学 习 的 生 物 行 为 分 析 方 法
[2,3,4,5,6,7]
。
视觉传感器拍摄到的图像是二维的,只能检测到生物在二维平面中运动的
信息,无法获得生物在三维空间的姿态信息。目前对于运动物体姿态信息的测
量,多采用惯性测量传感器(Inertial Measurement Unit,IMU)。九轴 IMU 是一款
集成了三轴加速度计、三轴角速度计、三轴磁力计的微型装置,具有体积小、
重量轻、成本低、功耗低、可靠性高抗震动冲击能力强等优势
[8,9,10]
,可以实时检
测出运动物体的姿态信息。鉴于此,在生物行为分析系统中,本文选用 IMU 测量
小鼠的姿态信息。
本文利用数字图像处理技术检测出小鼠在二维平面上的运动行为信息;使
用 IMU 传感器检测出小鼠在三维空间中的加速度、角速度、磁力等信息,并利
用扩展卡尔曼滤波算法(Extended Kalman Filtering,EKF)解算出小鼠的姿态信
息。实验结果显示,所设计的系统能够有效地实现小鼠行为信息的全面检测和
分析。
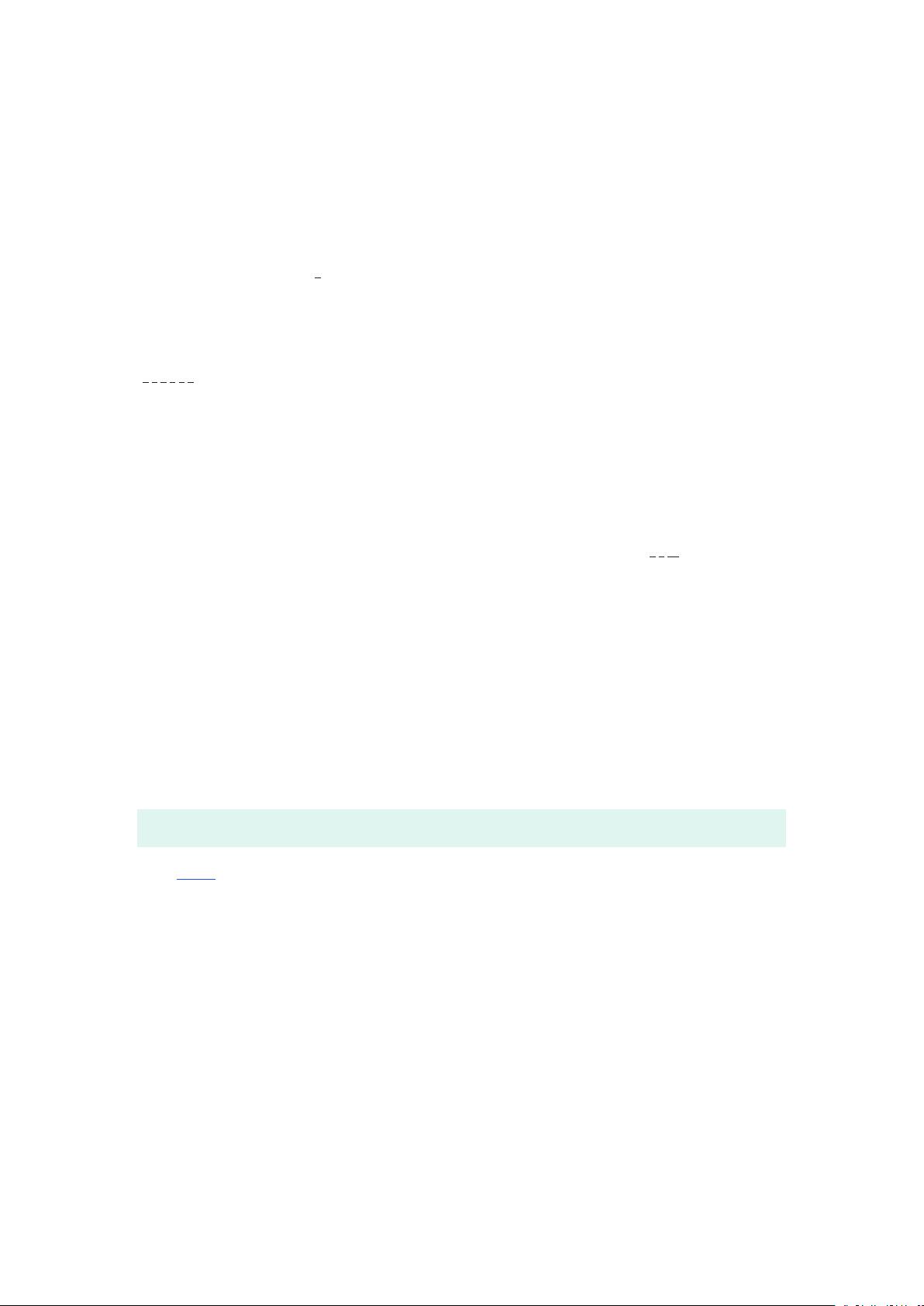
1 系 统综述
图 1 为所设计的系统的总体框图,具体操作步骤如下:
图 1
剩余16页未读,继续阅读
资源评论


罗伯特之技术屋
- 粉丝: 3550
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP











