
0. 引 言
视觉/LiDAR 里程计模块是无人车定位建图系统的重要组成部分,根据传感器数据对
无人车在多个自由度上运动的过程进行估计,可用于环境感知、运动控制、相对定位、地
图构建等。
目前针对视觉、LiDAR、IMU 里程计的构建已经有一些解决方案。2019 年,浙江大
学的 Zuo X 等
[1]
基于 MSCKF 提出的 LIC-Fusion 方法利用从 LiDAR 检测到的平面、边线几
何特征和稀疏的视觉特征,在线标定了传感器间的时间和空间参数,以提高精度。2021
年,MIT 的 Shan T 等
[2]
提出的 LVI-SAM 由视觉惯导系统和激光惯导系统构成,当两个系
统中的一个失败的时候,LVI-SAM 仍然可以工作,这极大地提升了系统在缺少纹理或者特
征场景中的鲁棒性。2018 年,Kaarta 公司的 Zhang J 等
[3]
提出了一种由粗到精的运动估计
方法:先是通过 IMU 来预测,再通过视觉惯性里程计计算主车运动,最后通过激光点云拼
接的方法来进一步修正估计结果,利用后续环节的输出修正 IMU 速度和零偏状态的误差。
2021 年,香港大学的 Lin J 等
[4]
发表的 R2 LIVE 多传感器融合框架由两部分组成:基于滤
波器的里程计和因子图优化模型;为了提高处理效率,系统通过误差迭代卡尔曼滤波器进
行状态估计,并通过因子图优化进一步提高整体精度。
以上方法虽然可以满足在线实时应用的需求,但需要消耗大量的 CPU 计算资源,尤
其是前端部分。因此搭建一个精度高、CPU 资源占用少、GPU 资源利用合理的视觉、
LiDAR、IMU 信息融合的里程计是有实用价值的。
文中提出了一种基于因子图优化的视觉、LiDAR、IMU 实时里程计,支持多种运行模
式和初始化方式。
(1)提出了一种多传感器信息融合的里程计系统:LiDAR 前端采用改造后的 ICP
CUDA
[5]
算法提高了处理帧率、利用退化因子提高了在退化场景的精度,视觉特征处理考虑
了消除相机 Rolling Shutter 的快门效应,提高了视觉测量的精度。
(2)系统根据传感器配置,支持按照全量的视觉 LiDAR 惯性里程计(Visual LiDAR
Inertial Odometry,VLIO)、关闭视觉的 LiDAR 惯性里程计(LiDAR Inertial Odometry,
LIO)和关闭 LiDAR 的视觉惯性里程计(Visual Inertial Odometry, VIO)模式运行,并支
持 LiDAR 初始化和视觉初始化,扩展了系统的应用场景。
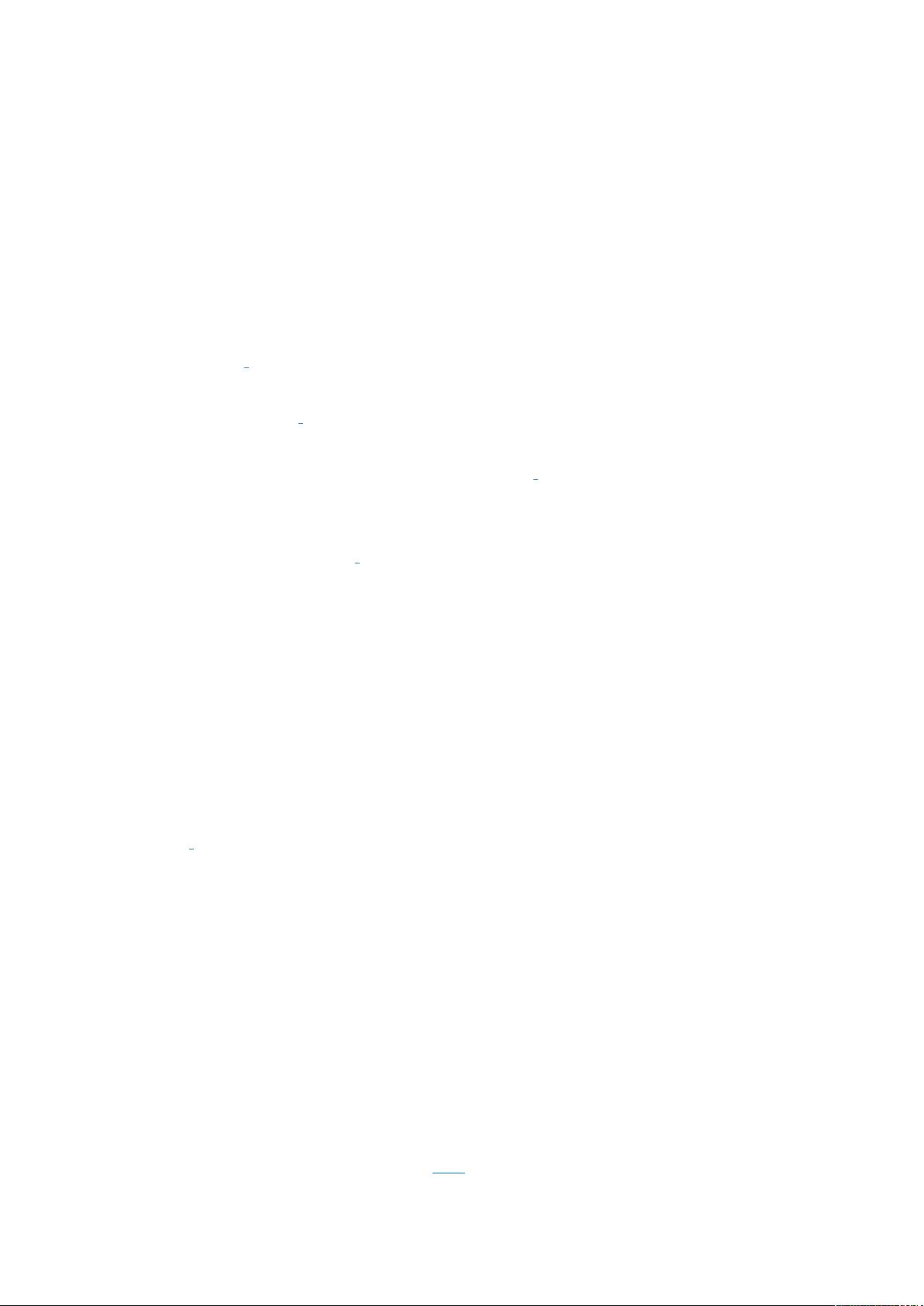
1. 系统及工作原理
设计方案实现了视觉、LiDAR、IMU 的里程计,并以轮速计作为辅助传感器用于车速
测量和运动先验计算。系统的整体方案如图 1 所示。

剩余16页未读,继续阅读
资源评论


罗伯特之技术屋
- 粉丝: 4457
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
- 基于Java与前端技术的全国实时疫情信息网站设计源码
- 基于鸿蒙系统的HarmonyHttpClient设计源码,纯Java实现类似OkHttp的HttpNet框架与优雅的Retrofit注解解析
- 基于HTML和JavaScript的廖振宇图书馆前端设计源码
- 基于Java的Android开发工具集合源码
- 通过 DirectX 12 Hook (kiero) 实现通用 ImGui.zip
- 基于Java开发的YY网盘个人网盘设计源码
- 通过 DirectX 11 基于 GPU 调整图像大小.zip
- 通用 DirectX.zip
- 基于Python语言的推荐系统设计源码推荐
- 通用 C++,DirectX 游戏引擎模板.zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


