基于 SPSS 数据处理的古代玻璃制品的成分分析与鉴别
版权申诉
89 浏览量
2022-11-30
10:06:31
上传
评论
收藏 1.14MB PDF 举报

1
无人机遂行编队飞行中纯方位无源定位问题的分析与设计
摘要
本文针对无人机遂行编队飞行中纯方位无源定位问题进行研究,采用动态规
划模型,旨在对略有偏差的无人机进行位置的调整。
针对问题 1 的第一小问,采用三点定位算法,考虑到圆心 FY00 的无人机与
圆周上任意两个无人机的编号已知且位置无偏差,假设半径为 ,随机选取圆周
上的两架无人机,则有 种选取结果,求解被测无人机的定位,我们采用三角
形的余弦定理,列出三个方程组解得 度数,通过圆周上两架飞机的位置
与方位角信息可以确定两条定位线,定位线的交点即为被测飞机的位置。
针对问题 1 的第二小问,得到的结果为除 FY00 与 FY01 外,还需要两架无
人机发射信号,才能实现无人机的有效定位。已知 FY00,FY01 的编号且位置无
偏差,为使其它无人机能够有效定位,将 FY00 定义为坐标原点,从 FY00 指向
FY01 的方向定义为 轴的正方向, 轴绕原点逆时针旋转 90°定义为 轴,在此
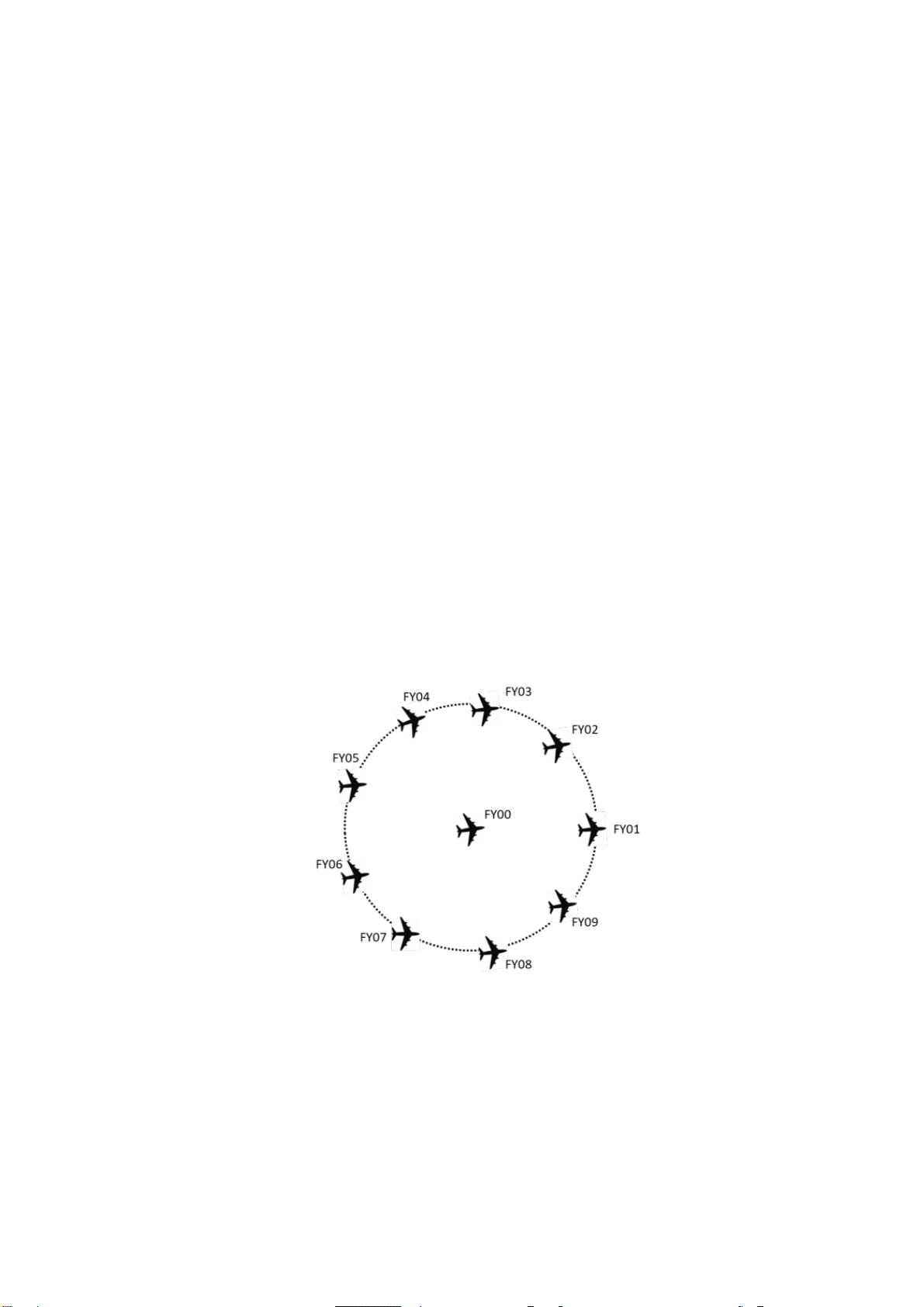
坐标系下计算出偏离点的坐标。具体做法为:以 FY04,FY08,FY01 为圆周上
的发射点,FY00 为圆心的发射点,以 FY06 为偏差点,通过三角形的余弦定理,
求出偏离点 FY06 到两个坐标轴的距离。由编队示意图得到该点所在的象限,结
合其至两坐标轴距离的数据,得到偏差无人机所在的象限位置,即实现了无人机
的有效定位。
针对问题 1 的第三小问,通过表 1 得知仅有 FY00,FY01 是位置无偏差的无
人机,为把剩余的无人机全部调整到圆周上且使其均匀分布,先通过 FY00,FY01
的准确位置坐标的方向信息来调整并确定 FY02 的位置,之后根据动态规划模型
逆时针依次计算出其它无人机调整后的准确位置。
针对问题 2,使用 FY01,FY02,FY03 三架无人机发射信号,通过电磁信号
三者自行调整。若三者连线呈等边三角形,说明它们已调整到准确位置。再用
FY05 无人机发射信号,用 FY01,FY02, FY03 三架无人机定位的准确方位信
息来确定 FY05 无人机的位置方向信息,根据动态规划模型与相邻无人机之间的
几何特点,依次求出所有无人机的准确位置以实现无人机的有效定位。
关键词:动态规划模型;余弦定理;无人机编队
剩余11页未读,继续阅读
资源评论


孙宇航_
- 粉丝: 1287
- 资源: 28

下载权益

C知道特权

VIP文章

课程特权
开通VIP











