没有合适的资源?快使用搜索试试~
我知道了~
文库首页
行业研究
数据集
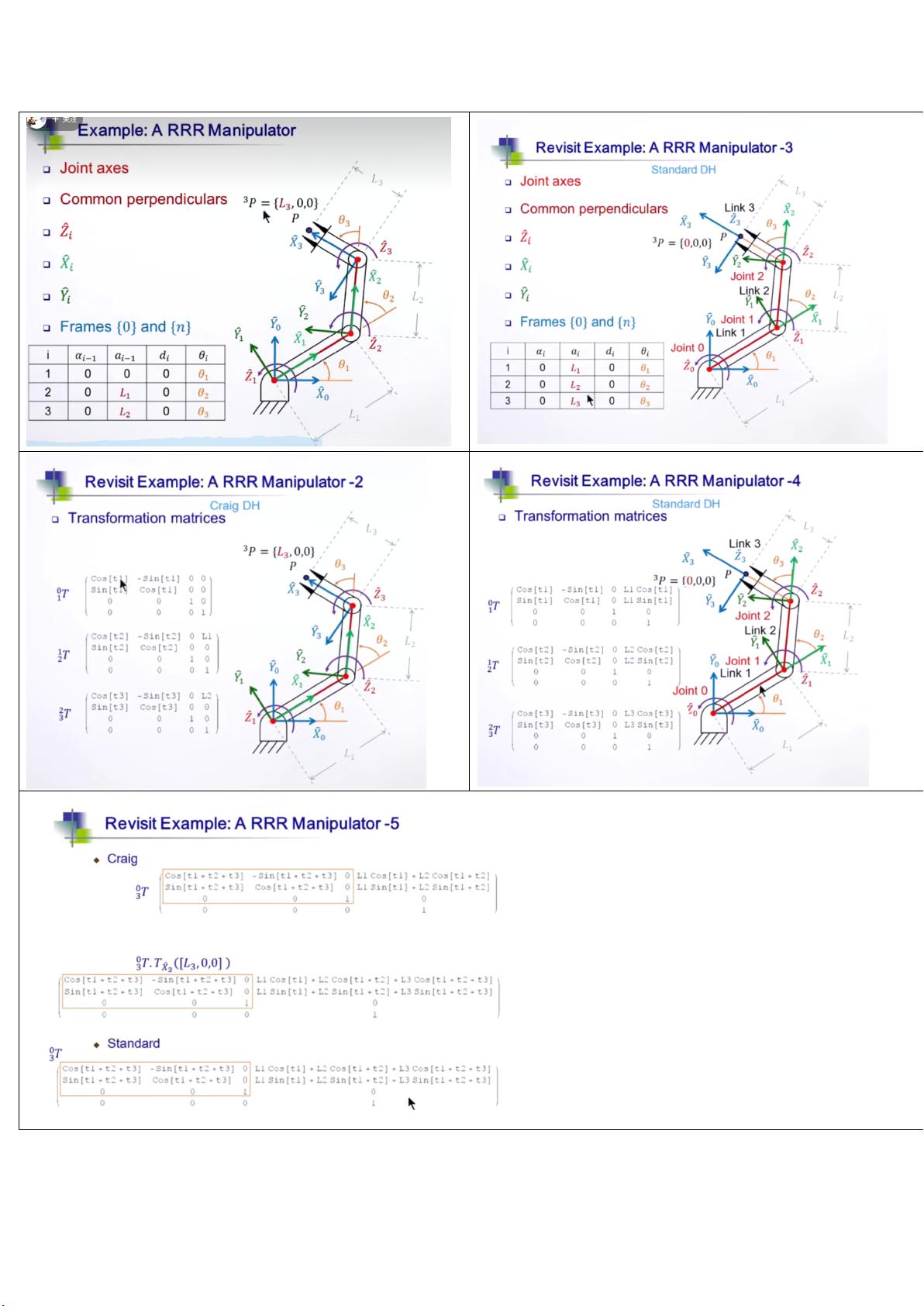
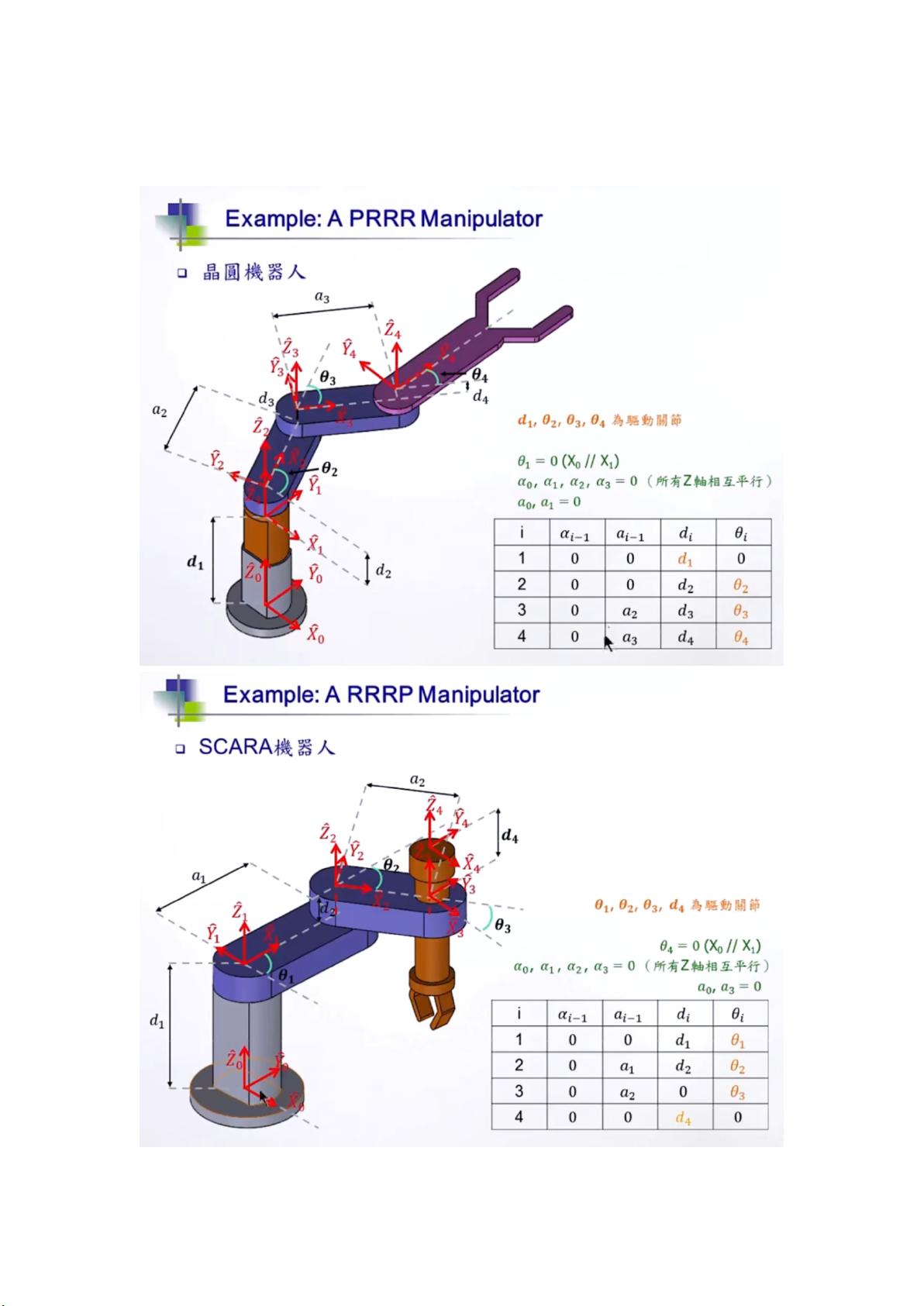
运动学笔记运动学笔记运动学笔记
运动学笔记运动学笔记运动学笔记
需积分: 0
0 下载量
8 浏览量
2023-03-13
14:34:17
上传
评论
收藏
15.6MB
DOCX
举报
温馨提示
立即下载
运动学笔记运动学笔记运动学笔记
资源推荐
资源详情
资源评论
最优控制和轨迹规划学习笔记 包含多个实际案例 倒立摆上翻控制 满足车辆运动学约束的路径规划 离散点参考线优化 lattice横向
浏览:200
最优控制和轨迹规划学习笔记 包含多个实际案例 倒立摆上翻控制 满足车辆运动学约束的路径规划 离散点参考线优化 lattice横向距离规划
机器人运动学+DH参数获取方法(笔者自己在学习的时候手写的笔记,拍成照片放进excel了)
浏览:26
这是一个excel表格,包含内容为笔者总结的机器人运动学(逆运动学)以及DH参数获取方法的归纳总结,有助于对机器人或者机械臂的初期学习。
运动学:运动学
浏览:53
运动学:运动学
大学物理 运动学
浏览:180
大学物理 力学研究对象:机械运动力学研究的内容: 运动学:研究如何描述物体的运动以及 各运动量之间的关系
AS3.0 3运动学
浏览:190
S3.0:全名为ActionScript3.0,Action意为开始拍摄;Script意为脚本或剧本。两个词放在一起可译为“开始脚 本”或“开始照着剧本拍摄”或“照着剧本,开始拍摄”。现在它已经升级到了 3.0 版本。后面还有其它语言的 程序设计课程,我以AS3.0作为编程的入门语言。
质点运动学
浏览:197
好东西哦,大家千万不要错过喔,记得不要错过喔!!!!!
机械臂逆运动学八组逆解求解程序,MATLAB实现
浏览:122
对机械臂求逆解,以puma560为原型,该机械臂理论上每个姿态对应着八组逆解,本程序则将该机械臂的八组逆解全部求出,以函数形式调用。
四足控制/机器人学笔记(一)
浏览:147
在学习机器人运动学之前我们应该先学会一些基础知识。机器人的位姿表示和坐标变换对初学者来说也是一个比较难理解的地方(个人认为),我的笔记只是讲出了我在学这些的时候心里的想法,不敢说我的想法一定对,但我...
考研运动训练学考研复习资料.pdf
浏览:72
考研运动训练学考研复习资料.pdf
三菱Q系列运动控制器实模式编程学习笔记
浏览:127
4星 · 用户满意度95%
本文档为本人学习中的笔记,详细,扼要,为你对三菱Q系列运动控制器的学习铺平道路
a质点运动学
浏览:175
nullnull1.以下五种运动中, a 保持不变的运动是 [ D ](A) 单摆的运动。(B) 匀速率圆周运动。(C) 行星的椭圆轨道运动。(D) 抛体运动。(E) 圆锥摆运动。null2.一质
UP-6逆运动学
浏览:149
安川机器人逆运动学求解,基于常用的灵巧空间,并不能算出所有情况的逆解
机器人运动学
浏览:97
包括:杆件参数的意义 坐标系的建立原则 杆件坐标系间的变换过程-相邻关节坐标系的齐次变换 机器人的运动学方程
军队文职考试(数学2+物理)中公式和知识点总结笔记(包含所有章节核心知识点)
浏览:106
5星 · 资源好评率100%
物理部分是针对每个领域做的笔记,包括运动学、光学、热学、电磁学 等等,已经包括了所有领域。对每个领域的知识点做了很简洁的知识梳理和总结,更重要的是包括了特别容易做错,特别容易混肴的知识点总结。方便记忆...
机械臂正运动学程序,两种实现方式,robotics工具箱和转换矩阵
浏览:51
包含两种机械臂建模实现方式,可以求出机械臂正运动学末端坐标系到基坐标系的转换矩阵,有转换矩阵形式实现和robotics toolbox实现
《机器人机构学》课程设计报告
浏览:70
《机器人机构学》是机器人学领域中的重要学科,它主要研究机器人机构的运动学、动力学和控制等方面的问题。为了更好地帮助学生掌握机器人机构学的基本概念和理论知识,本次课程设计所需的资源包括教学设备、教材和...
TwinCAT3.1 学习笔记 _V1.07_20170315.pdf
浏览:66
适合刚刚入门倍福控制系统,全套资料 学习笔记 运动控制
#资源达人分享计划#threejs学习Demo笔记.rar
浏览:146
#资源达人分享计划#threejs线条以及动画效果源码示例,部分效果需要在服务器下打开
全向轮运动学1
浏览:58
于是机器人的位置和姿态可以用向量 来描述:在机体坐标系中的线速度及角速度为:于是两坐标系下速度转换公式如下:轮子的姿态在机体坐标系中的位置和子态可以表示为:全向
逆运动学
浏览:81
MySQL工作台 版权所有(c)2007、2021,Oracle和/或其分支机构。 这是一个版本, 是用于处理MySQL服务器和数据库的图形工具。 许可证信息可在文件中找到。 此发行版可能包含第三方开发的材料。 有关这些材料的许可和归属声明,请参阅文件。 有关MySQL Workbench的更多信息,请访问 有关其他下载和MySQL Workbench的来源,请访问 OracleMyS
第3章 机器人运动学
浏览:77
机器人学 第三版 蔡自兴 授课PPT,介绍机器人学的基本原理及其应用,全书共12章,系统而全面的介绍机器人学方面的知识。
移动机器人复习笔记1
浏览:56
第一章第二章为概论,不做考察。移动机器人自由度分析移动机器人运动学模型极坐标控制器设计,为什么要这样。5 移动机器人传感5.1 里程计误差模型推导光电传感器 怎
MIT-Cheetah-Note:MIT Cheetah仿真平台源码笔记以及一部分第三方组件
浏览:60
5星 · 资源好评率100%
MIT-Cheetah-NoteMIT Cheetah仿真平台源码笔记以及一部分第三方组件仓库说明在...LegController 对应源码中LegController相关文件的剖析,主要是四足机器人腿部运动学的参数处理以及正、逆运动学的计算。FootSwingTraje
MATLAB汽车刹车系统模拟笔记.md
浏览:30
给出了在MATLAB中实现的完整代码,包括定义参数和力的计算函数、求解运动学方程、设置终止条件等过程。并计算了更准确的制动距离,进行了速度和位置的动画可视化。 适合人群: 需要进行动力学系统建模和仿真的专业人员...
剩余12页未读,
继续阅读
评论
收藏
内容反馈
立即下载
资源评论
资源反馈
评论星级较低,若资源使用遇到问题可联系上传者,3个工作日内问题未解决可申请退款~
联系上传者
评论
大师兄橙子
粉丝: 0
资源:
1
私信
上传资源 快速赚钱
我的内容管理
展开
我的资源
快来上传第一个资源
我的收益
登录查看自己的收益
我的积分
登录查看自己的积分
我的C币
登录后查看C币余额
我的收藏
我的下载
下载帮助
前往需求广场,查看用户热搜
最新资源
asdasdasdasdasdasdasd
华夏车牌识别V85,V86自定义控件
关于数据库系统概论.md
MyClassTest.java
comBlackTech【C#操作COM组件的黑科技!】.zip
教学内容及补充-cha7.rar
设计1.ms14
vscode-1.64.1.tar源码文件
vscode-1.64.0.tar源码文件
vscode-1.52.0.tar源码文件
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈
安全验证
文档复制为VIP权益,开通VIP直接复制
信息提交成功