Robotic Toolbox 博客学习文件Robotic Toolbox 博客学习文件
需积分: 5 116 浏览量
2022-08-16
15:20:34
上传
评论
收藏 443KB PDF 举报


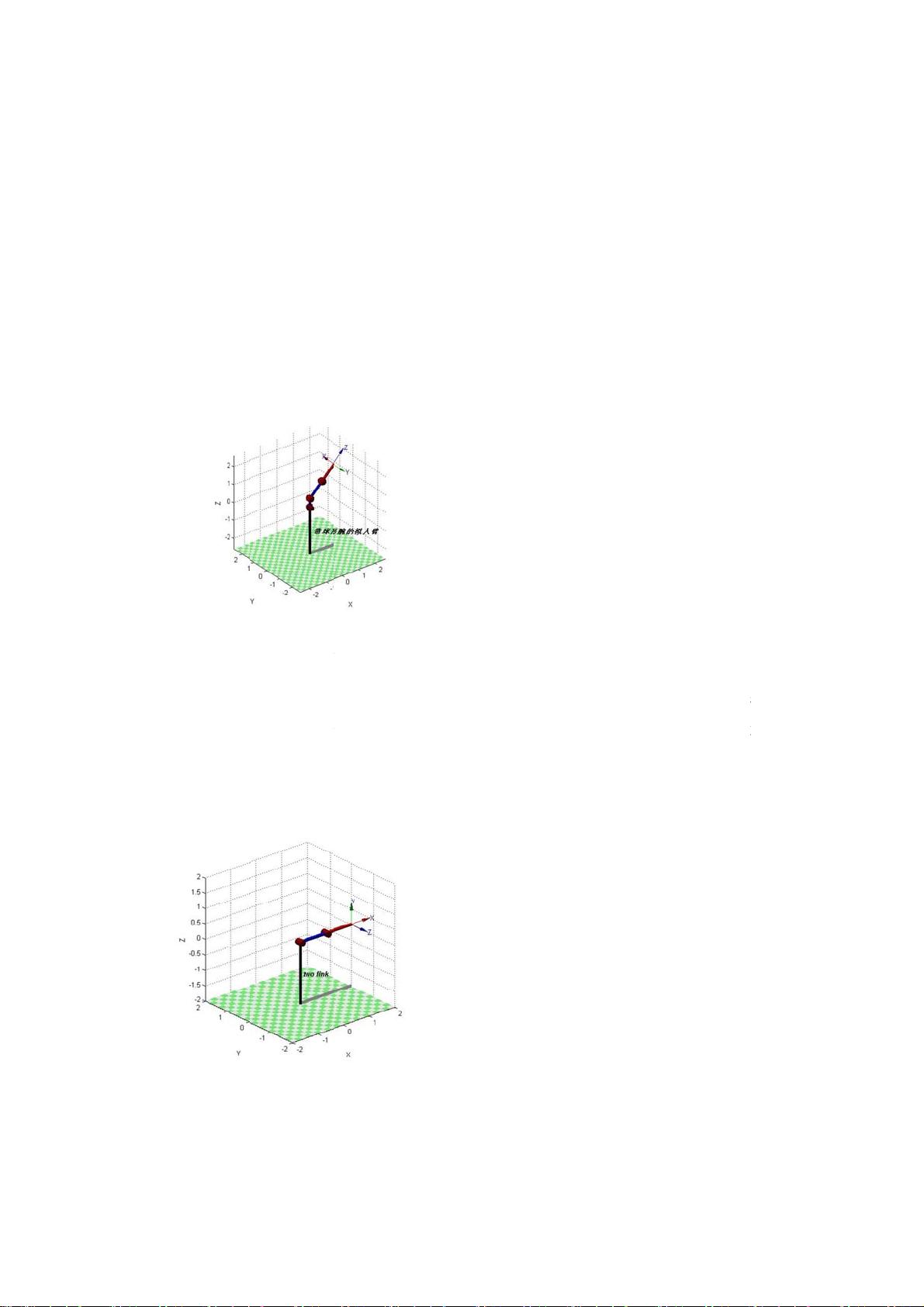
(1):建立机器人模型
创建机器人的两个最重要的函数是:Link 和 Seriallink
Link 类
Link 对象包括连杆的各种属性:运动学参数、惯性张量、电机、传递矩阵等
Link 的类函数:
A :关节传动矩阵
RP :关节类型
friction : 摩擦力
nofriction : 摩擦为 0
dyn : 显示动力学参数
islimit:检测关节变量是否超出范围
isrevolute : 检测关节是否为转动关节
isprismatic : 检测关节是否为移动关节
display : 显示 D-H 矩阵
char : 转化为字符串
Link 的类属性(读/写):
theta:D-H 参数
d:D-H 参数
a:D-H 参数
alpha:D-H 参数
sigma: 默认 0,旋转关节;1,移动关节
mdh: 默认 0,标准 D-H;1,改进 D-H
offset:关节变量偏移量
qlim:关节变量范围
m: 质量
r: 质心
I: 惯性张量
B: 粘性摩擦
Tc: 静摩擦
G: 减速比
Jm: 转子惯量
例如:定义连杆
L=link('d',1.2,'a', .3,'alpha',pi/2,'offset',pi/2,‘mdh’,1,'qlim',[-pi,pi],'m'
,0.5,'r',[0 0 0.05],'I',[0.001 0 0; 0 0.001 0; 0 0 0.05]);
b1=isrevolute(L); %判读 L 是否为旋转连杆
b2= L.d; %读取 L 连杆的长度
Seriallink 类
Seriallink 的类函数:
类函数比较多,包括显示机器人、动力学、逆动力学、雅可比等,
用的最多的是:SerialLink 和 plot,用来显示机器人
R=SerialLink(links, options);
R.plot(theta);
R=SerialLink(links, options);

剩余13页未读,继续阅读













评论0