机器人应用案例 (焊接)
需积分: 5 50 浏览量
2024-07-01
21:34:24
上传
评论
收藏 9.82MB PDF 举报

焊接机器人应用
案例1:GSK RH06焊接机器人广州汽车配饰有限公司焊接工
装上的应用
• 客户要求
• 将 散件装夹在专用夹具上进行满焊,焊接不允许扭曲,不能出现虚焊,
咬边,气孔等焊接缺陷;
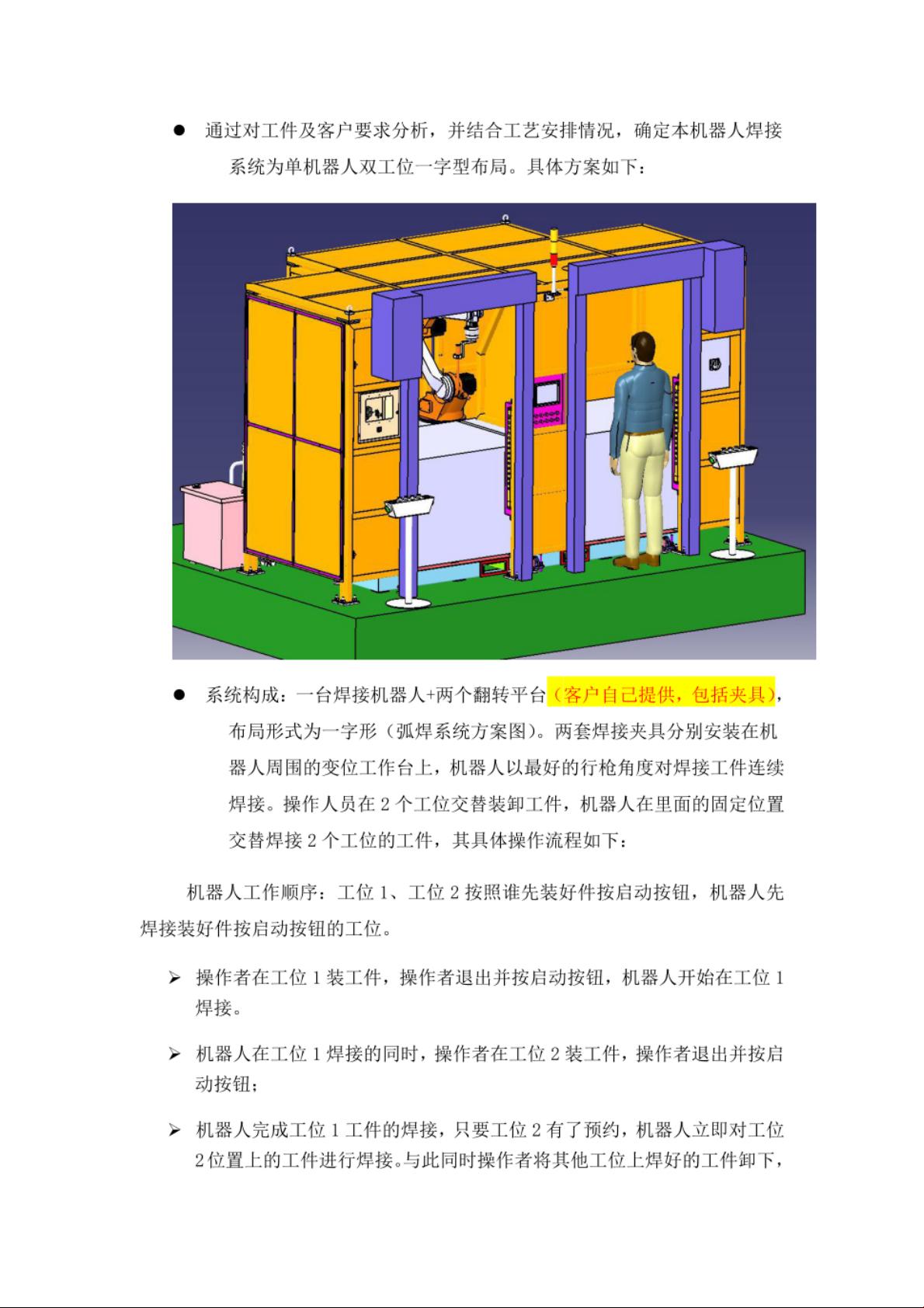
• 在 机器人可达范围内,尽量减少人工于两工位之间的活动范围,合理布
局工作站,工作站要紧凑,合理利用空间,减少占地面积;
• 工 作站具备防弧光、安全光栅等安全设施,两工位独立进行,互补影响
干涉,进一步提高设备的使用率;
图 1 2 .1 半成品效果图
• 解决方案
剩余17页未读,继续阅读
资源评论













