FANUC基础是工业机器人领域中的重要组成部分,尤其对于使用FANUC机器人的工程师和技术人员来说,理解这些基础知识至关重要。以下是对FANUC基础的详细解释:
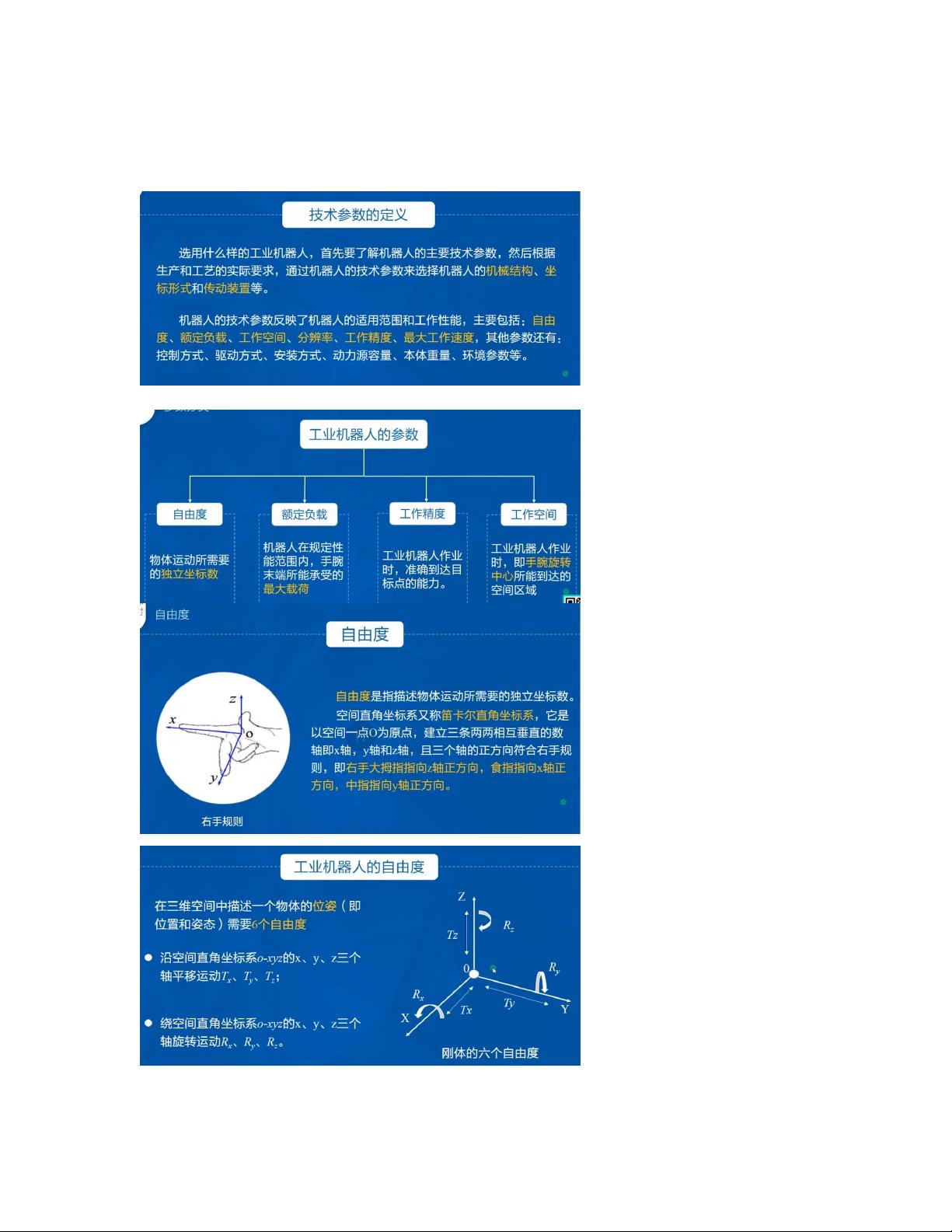
1. 主要技术参数:
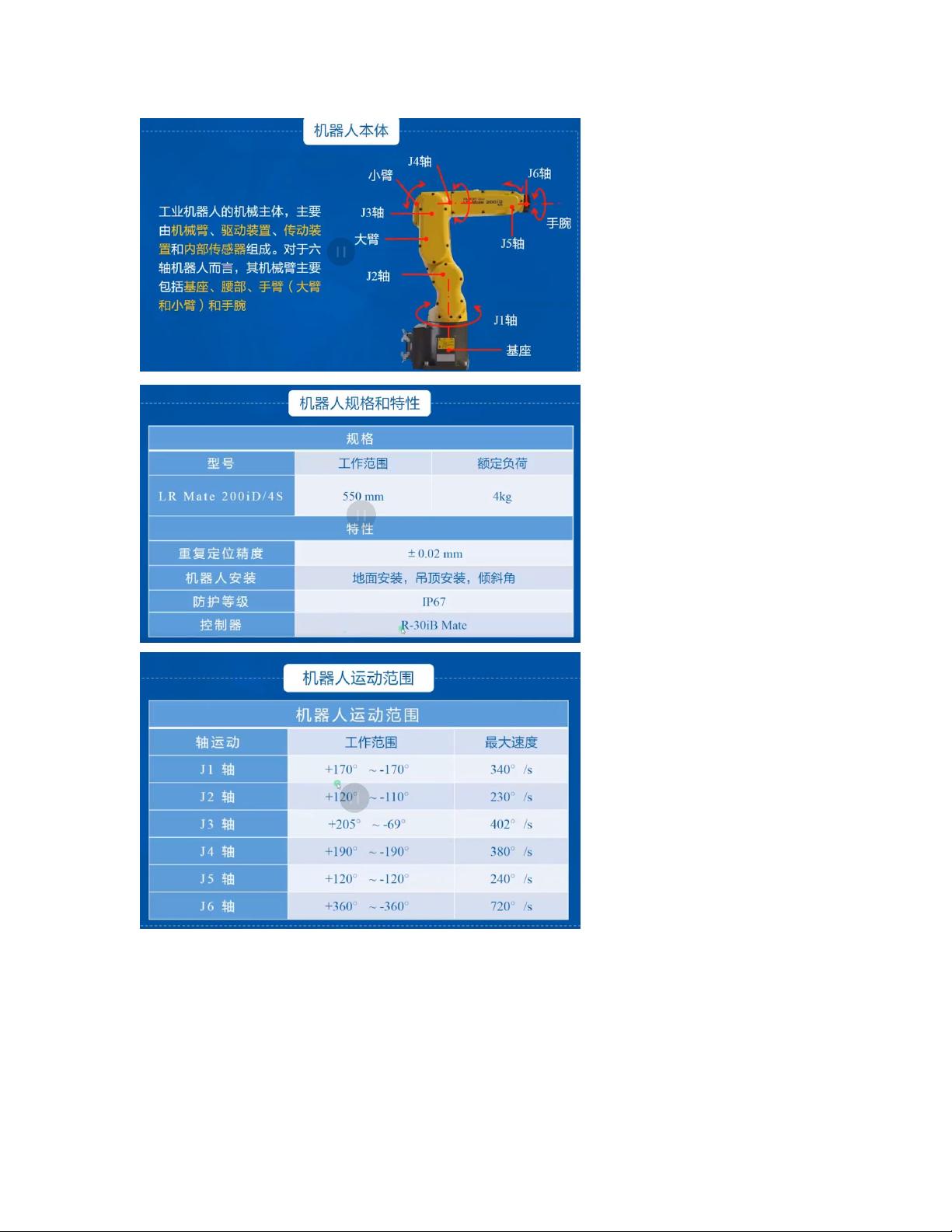
- 自由度:指机器人可以独立运动的关节数量,通常FANUC机器人有6个自由度,能实现灵活的三维空间运动。
- 额定负载:机器人在各关节角度下能承载的最大负载重量。
- 工作空间:机器人手臂能够到达的所有空间范围。
- 分辨率:机器人关节运动的最小单位,决定了精度。
- 工作精度:机器人完成任务时的准确度,与硬件和控制算法有关。
- 最大工作速度:机器人在安全范围内能达到的最高速度。
- 控制方式:如FANUC的伺服控制系统,确保高精度和稳定性。
- 驱动方式:如电动伺服驱动,提供高效动力。
- 安装方式:如地面安装、壁挂安装等,根据工作场景选择。
- 动力源容量:如电源规格,确保系统稳定运行。
- 本体重量:对安装和使用环境有直接影响。
- 环境参数:考虑温度、湿度、尘埃等因素,确保机器人正常工作。
2. 机器人项目实施流程:
- 开始:项目启动,规划需求。
- 项目分析:评估工作环境,选择合适型号的机器人,设计现场布局,考虑设备间的通讯。
- 机器人组装:根据手册装配机器人各个部件。
- 系统配置:设置控制器参数,配置I/O接口。
- 坐标系建立:建立工作坐标系和用户坐标系,为编程做准备。
- I/O信号配置:分配输入输出信号,连接控制设备。
- 编程:编写机器人运动指令,实现预定任务。
- 自动运行:测试程序,确保机器人按照预期动作。
- 结束:项目调试完成,正式投入生产。
3. 坐标系种类:
- 关节坐标系:以每个关节角度为坐标。
- 世界坐标系:固定不变的全局参考系。
- 手动坐标系:方便手动操作的临时坐标系。
- 工具坐标系:根据末端执行器定位,例如焊接枪或抓手。
- 用户坐标系:用户自定义的坐标系,便于特定任务编程。
- 单元坐标系:在多台机器人协作时,用于避免运动冲突。
4. 坐标系的建立:
- 工具坐标系和用户坐标系的建立涉及到多点标定方法,如六点法、三点法或直接输入法,确保坐标系的准确性。
5. I/O种类:
- 通用I/O:数字I/O、组I/O、模拟I/O,适用于不同类型的信号输入输出。
- 专用I/O:机器人I/O、外围设备I/O、操作面板I/O,针对特定功能的接口。
6. I/O通信:
- FANUC的R-30iB Mate主板具有I/O接口,通过CRMA15和CRMA16电缆连接外围设备,进行信号传输和分配。
在实际应用中,理解和掌握这些基础知识能有效地提高FANUC机器人的操作和编程效率,确保系统的稳定性和安全性。对于初学者来说,通过实践和学习,逐步熟悉这些概念,将有助于更好地融入工业自动化领域。

















评论0