- -.
目录
目录........................................................................................................................1
第一章 概述............................................................................................................2
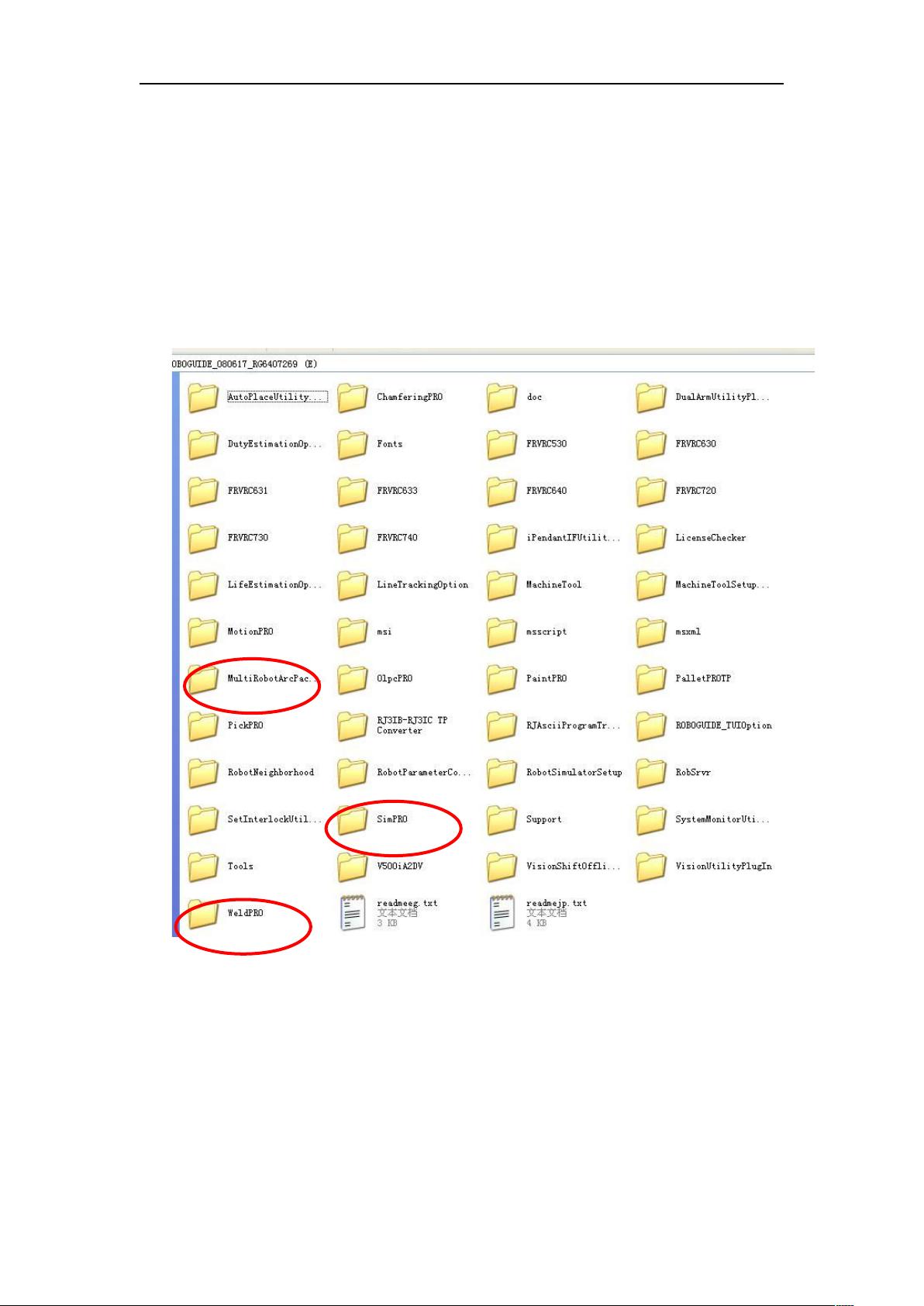
1.1. 软件安装...................................................................................................................2
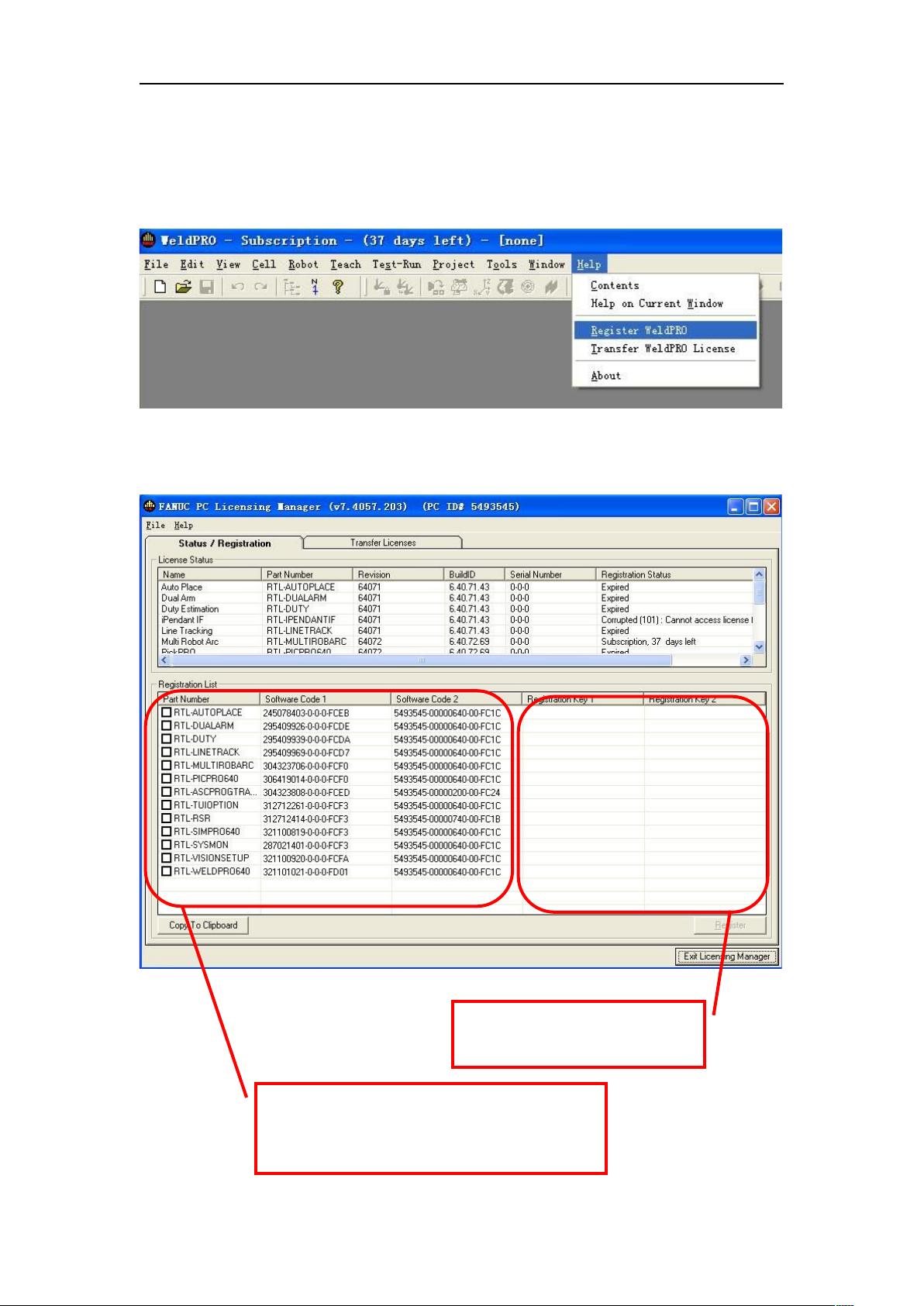
1.2. 软件注册...................................................................................................................3
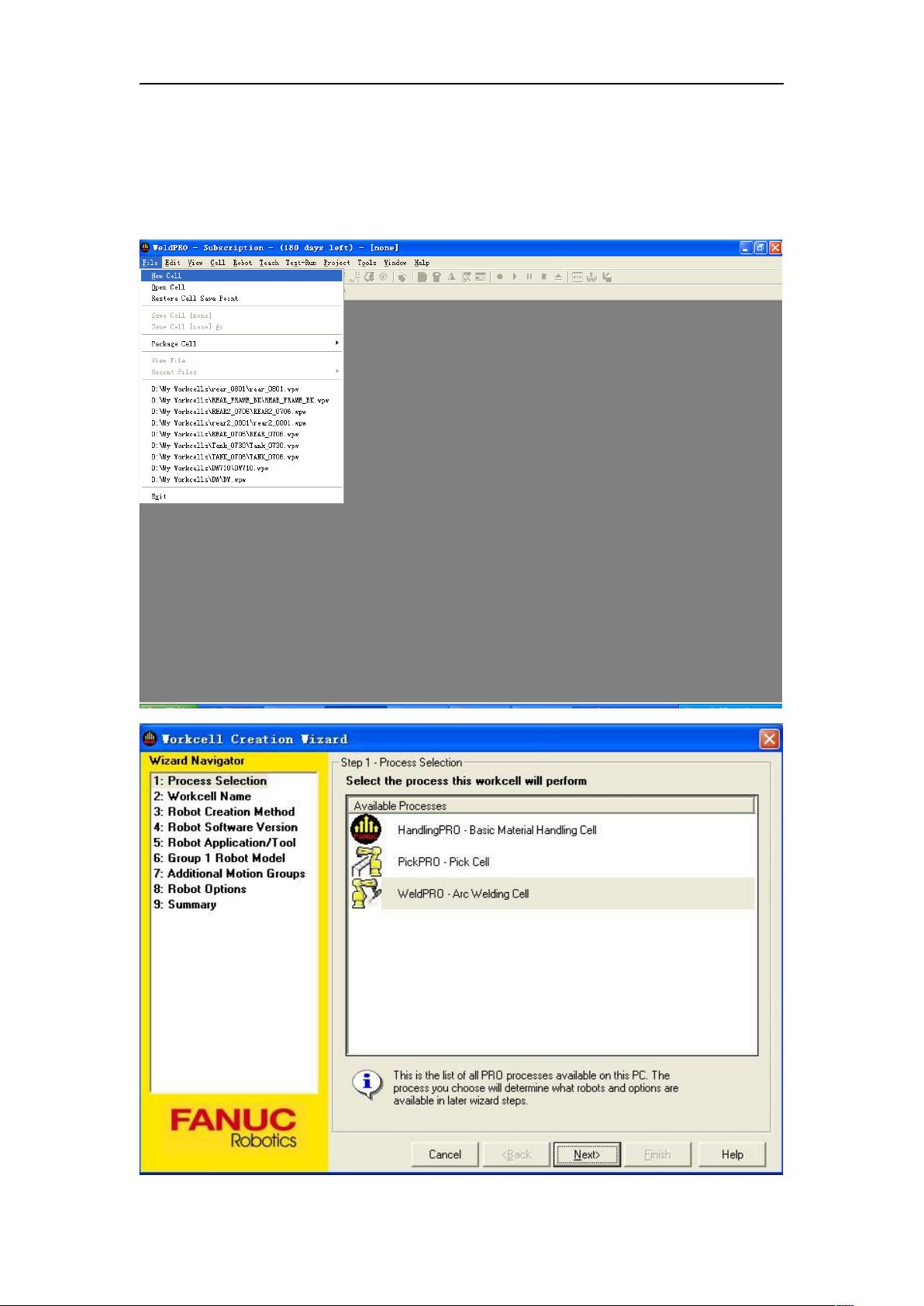
1.3. 新建 Workcell 的步骤................................................................................................4
1.3.1. 新建........................................................................................................................ 4
1.3.2. 添加附加轴的设置.................................................................................................9
1.4. 添加焊枪,TCP 设置。...........................................................................................15
1.5. Workcell 的存储目录...............................................................................................18
1.6.鼠标操作..................................................................................................................19
第二章 创建变位机..............................................................................................21
3.1.利用自建数模创建...................................................................................................21
3.1.1.快速简易方法.....................................................................................................21
3.1.2.导入外部模型方法.............................................................................................33
3.2.利用模型库创建.......................................................................................................43
3.2.1.导入默认配置的模型库变位机.........................................................................43
3.2.2.手动装配模型库变位机.....................................................................................46
第三章 创建机器人行走轴...................................................................................51
3.1. 行走轴-利用模型库..............................................................................................51
3.2. 行走轴-自建数模..................................................................................................57
第四章 变位机协调功能.......................................................................................64
4.1. 单轴变位机协调功能设置.......................................................................................64
4.2. 单轴变位机协调功能示例.......................................................................................73
..............................................................................................................................74
第五章 添加其他外围设备...................................................................................75
第六章 仿真录像的制作.......................................................................................78
- - 总结
Follower Group 即机器
人的组号。
输 入 值 后 , 需 要
按“ ENTER” ,并点击
F4“YES” 确认。
Leader Group 即 变 位
机的组号。
输 入 值 后 , 需 要
按“ ENTER” ,并点击
F4“YES” 确认。
机器人与变位机协调动作的相关程序
语句后面要添加 COORD
除协调动作相关程序之外,其他程序
语句需用 FINE ,不可用 CNT
位置数据
修改比例