Path Planning for Autonomous Vehicles in Unknown Semi-structured
194 浏览量
2024-01-17
11:32:14
上传
评论
收藏 1.64MB PDF 举报

Dmitri Dolgov
AI & Robotics Group,
Toyota Research Institute,
Ann Arbor, MI 48105,
USA
ddolgov@ai.stanford.edu
Sebastian Thrun
Michael Montemerlo
James Diebel
Stanford Artificial Intelligence Laboratory,
Stanford University,
Stanford CA 94305,
USA
{thrun, mmde}@ai.stanford.edu
Path Planning for
Autonomous Vehicles in
Unknown
Semi-structured
Environments
Abstract
We describe a practical path-planning algorithm for an autonomous
vehicle operating in an unknown semi-structured (or unstructured)
environment, where obstacles are detected online by the robot’s sen-
sors. This work was motivated by and experimentally validated in the
2007 DARPA Urban Challenge, where robotic vehicles had to au-
tonomously navigate parking lots. The core of our approach to path
planning consists of two phases. The first phase uses a variant of
A* search (applied to the 3D kinematic state space of the vehicle)
to obtain a kinematically feasible trajectory. The second phase then
improves the quality of the solution via numeric non-linear optimiza-
tion, leading to a local (and frequently global) optimum. Further, we
extend our algorithm to use prior topological knowledge of the envi-
ronment to guide path planning, leading to faster search and final tra-
jectories better suited to the structure of the environment. We present
experimental results from the DARPA Urban Challenge, where our
robot demonstrated near-flawless performance in complex general
path-planning tasks such as navigating parking lots and executing
U-turns on blocked roads. We also present results on autonomous
navigation of real parking lots. In those latter tasks, which are sig-
nificantly more complex than the ones in the DARPA Urban Chal-
lenge, the time of a full replanning cycle of our planner is in the range
of 50–300 ms.
The International Journal of Robotics Research
Vol. 29, No. 5, April 2010, pp. 485–501
DOI: 10.1177/0278364909359210
c
1 The Author(s), 2010. Reprints and permissions:
http://www.sagepub.co.uk/journalsPermissions.nav
Figures 1–15, 17 appear in color online: http://ijr.sagepub.com
KEY WORDS—path planning, autonomous driving
1. Introduction
The task of autonomous driving has received much attention
from the robotics community, especially in recent years with
events such as the DARPA Grand Challenges (Buehler et al.
2005) and the Urban Challenge (Buehler et al. 2008a,b) serv-
ing to catalyze research in the field.
In this paper, we focus on the problem of path planning
for an autonomous vehicle operating in an unknown environ-
ment. We assume the robot has adequate sensing and local-
ization capabilities and must replan online while incremen-
tally building an obstacle map. This scenario was motivated, in
part, by the DARPA Urban Challenge (DUC), where vehicles
had to freely navigate parking lots. The path-planning algo-
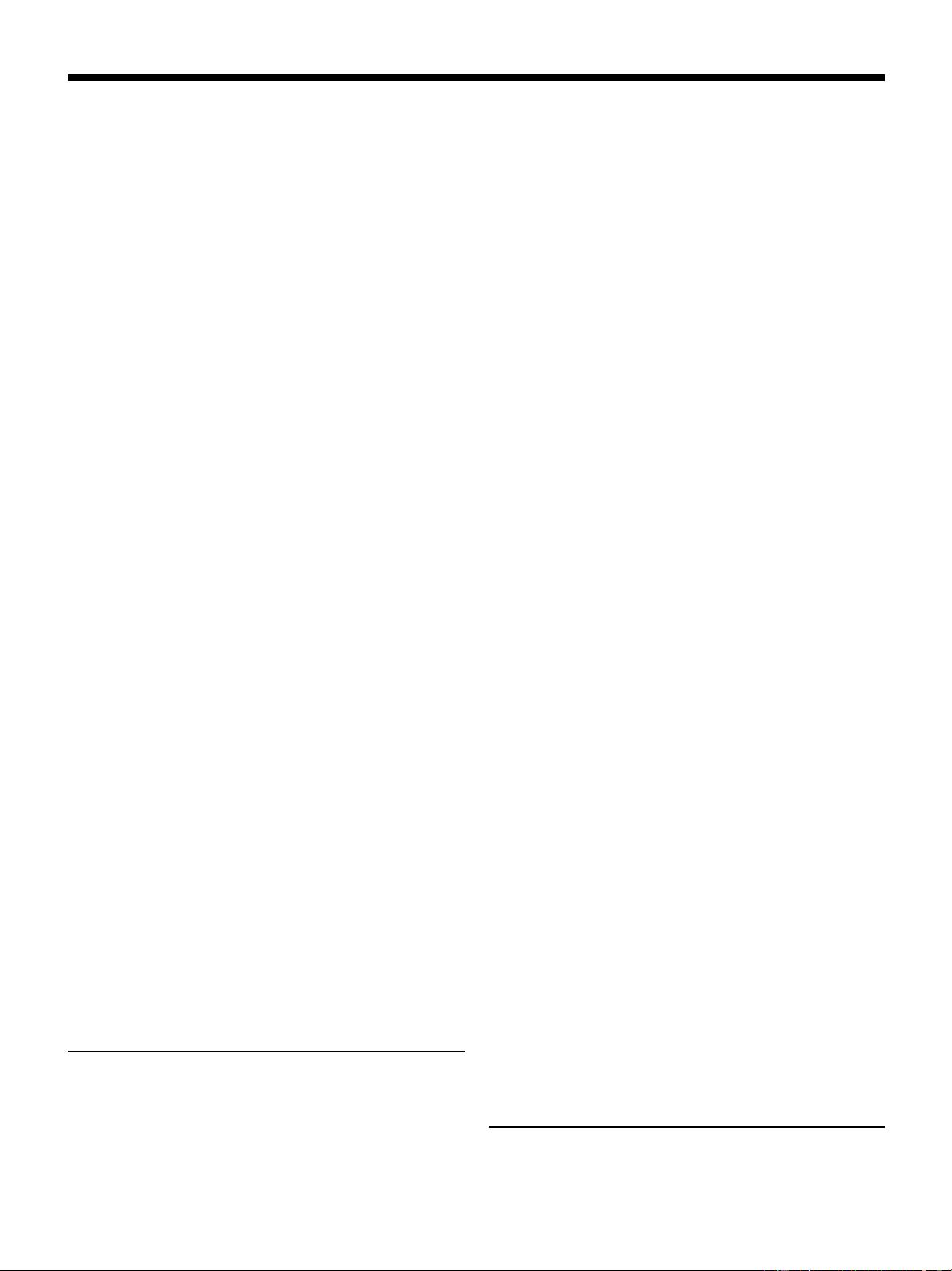
rithm described in this paper was used by the Stanford Racing
Team’s robot, Junior (Figure 1), in the DUC
1
. In the course of
the DUC and the preceding National Qualification Event, Ju-
nior demonstrated near-flawless performance in complex free-
space path-planning tasks (many involving driving in reverse)
such as navigating parking lots, executing U-turns, and dealing
with blocked intersections.
One of the main challenges in developing a practical
path planner for free-space navigation zones, such as park-
ing lots, arises from the fact that the space of all robot con-
1. See http://www.darpa.mil/grandchallenge/rules.asp.
485
at Kookmin University on March 20, 2016ijr.sagepub.comDownloaded from
剩余16页未读,继续阅读
资源评论


adcqwetqwe
- 粉丝: 0
- 资源: 1









最新资源
- 基于虚拟仿真环境下的自动驾驶交通标志识别python源码+文档说明+截图演示+数据集+使用教学(98分高分毕业设计)
- python实现的基于CNN深度学习网络的交通标志识别+源代码+文档说明+安装教程+使用教程(高分毕业设计)
- 基于Spring Bootd实现的图像去雾系统端,完成主要的前后端交互+源代码+文档说明
- 企业网站建设-PPT.ppt
- 办公自动化Microsoft-Office学习教程.doc
- 办公软件ECEL技巧培训课件-PPT.pptx
- 办公软件Word快捷键大全.doc
- Springboot集成SpringbootAdmin实现服务监控管理-源码
- 办公软件应用-计算机一级考试试题.doc
- 毕业设计-图像去雾,基于matlab实现的暗通道先验算法和Retinex图像增强算法制作的图形化界面程序仿真源码
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


