




OPTIMIZATION
Hunter–prey optimization: algorithm and applications
Iraj Naruei
1
•
Farshid Keynia
2
•
Amir Sabbagh Molahosseini
1
Accepted: 4 October 2021
The Author(s), under exclusive licence to Springer-Verlag GmbH Germany, part of Springer Nature 2021
Abstract
This paper proposes a new population-based optimization algorithm called hunter–prey optimizer (HPO). This algorithm is
inspired by the behavior of predator animals such as lions, leopards and wolves, and preys such as stag and gazelle. There
are many scenarios of animal hunting behavior, and some of them have transformed into optimization algorithms. The
scenario used in this paper is different from the scenario of the previous algorithms. In the proposed approach, a prey and
predator population, and a predator attacks a prey that moves away from the prey population. The hunter adjusts his
position toward this far prey, and the prey adjusts his position toward a safe place. The search agent’s position that was the
best value of the fitness function considered a safe place. The HPO algorithm implemented on several test functions to
evaluate its performance. Also, to performance verification, the proposed algorithm is applied to several engineering
problems. The results showed that the proposed algorithm performed effective in solving test functions and engineering
problems.
Keywords Hunter–Prey Optimizer HPO Algorithm Optimization Meta-heuristic Optimizer
1 Introduction
Optimization refers to the process of finding optimal values
for the parameters of a given system from all the possible
values to maximize or minimize its output (Mirjalili 2016).
Optimization problems can be found in various fields
which makes optimization methods essential, and provides
an exciting research direction for researchers (Hussain
et al. 2018). Optimization algorithms are an effective field
of research with exceedingly important improvements in
the resolve of intractable optimization problems. Signifi-
cant advances have been made since the first algorithm was
proposed, and many new algorithms are still being pro-
posed (Dokeroglu et al. 2019). Conventional optimization
methods such as the Newton method (Deuflhard 2011) and
quadratic programming (Hillier and Hillier 2003) have
problems such as local optimization stagnation and the
need to derive the search space (Simpson et al. 1994).
Stochastic optimization methods have become popular in
the last two decades (Spall 2003; Parejo et al. 2012;
Boussaı
¨
d et al. 2013). A meta-heuristic algorithm is an
algorithmic framework that can be applied to various
optimization problems with slight modifications. The use
of meta-algorithms significantly increases the ability to find
high-quality solutions to hybrid optimization problems. In
other words, a meta-heuristic algorithm is a heuristic
method that can search the search space to find high-quality
answers. The meta-algorithms’ common goal is to solve the
well-known challenging optimization problems (Dorigo
and Stu
¨
tzle 2004). Meta-heuristic methods have the fol-
lowing common characteristics (Crawford et al. 2017):
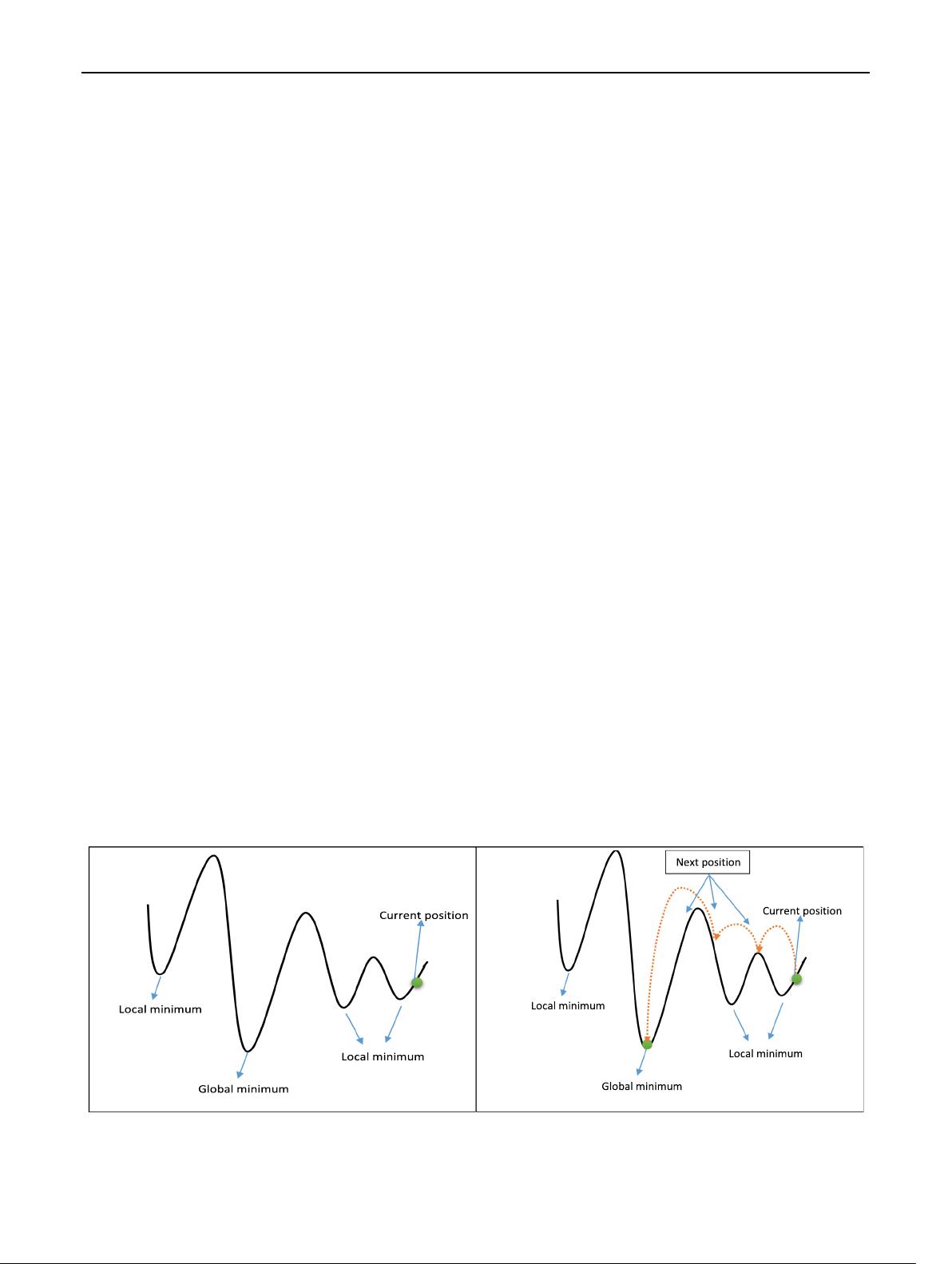
• These methods are somewhat probabilistic. This
approach avoids placing the algorithm in the optimal
local trap.
• A meta-heuristic is a high-level strategy that guides a
heuristic search process.
& Farshid Keynia
f.keynia@kgut.ac.ir
Iraj Naruei
irajnaruei@iauk.ac.ir
Amir Sabbagh Molahosseini
sabbagh@iauk.ac.ir
1
Department Engineering, Kerman Branch, Islamic Azad
University, Kerman, Iran
2
Department of Energy Management and Optimization,
Institute of Science and High Technology and Environmental
Sciences, Graduate University of Advanced Technology,
Kerman, Iran
123
Soft Computing
https://doi.org/10.1007/s00500-021-06401-0
(0123456789().,-volV)(0123456789().,-volV)















- 1
- 2
- 3
- 4
- 5
- 6
前往页