
4 步教你学会使用 matlab 模糊控制工具箱
Matlab 模糊控制工具箱为模糊控制器的设计提供了一种非常便捷的途径,通过
它我们不需要进行复杂的模糊化、模糊推理及反模糊化运算,只需要设定相应参数,
就可以很快得到我们所需要的控制器,而且修改也非常方便。下面将根据模糊控制
器设计步骤,一步步利用 Matlab 工具箱设计模糊控制器。
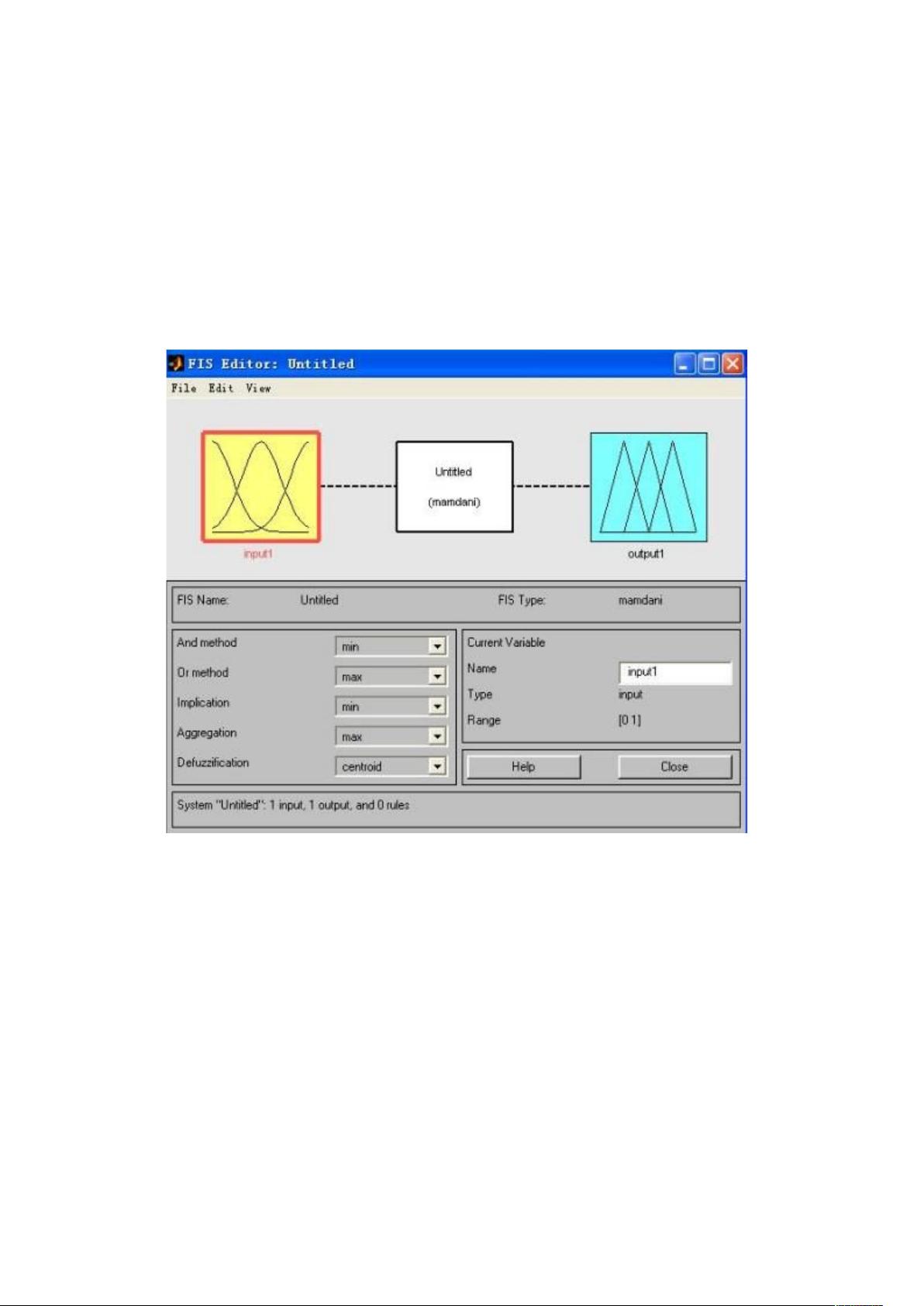
首先我们在 Matlab 的命令窗口(command window)中输入 fuzzy,回车
就会出来这样一个窗口。
下面我们都是在这样一个窗口中进行模糊控制器的设计。
1.确定模糊控制器结构:即根据具体的系统确定输入、输出量。
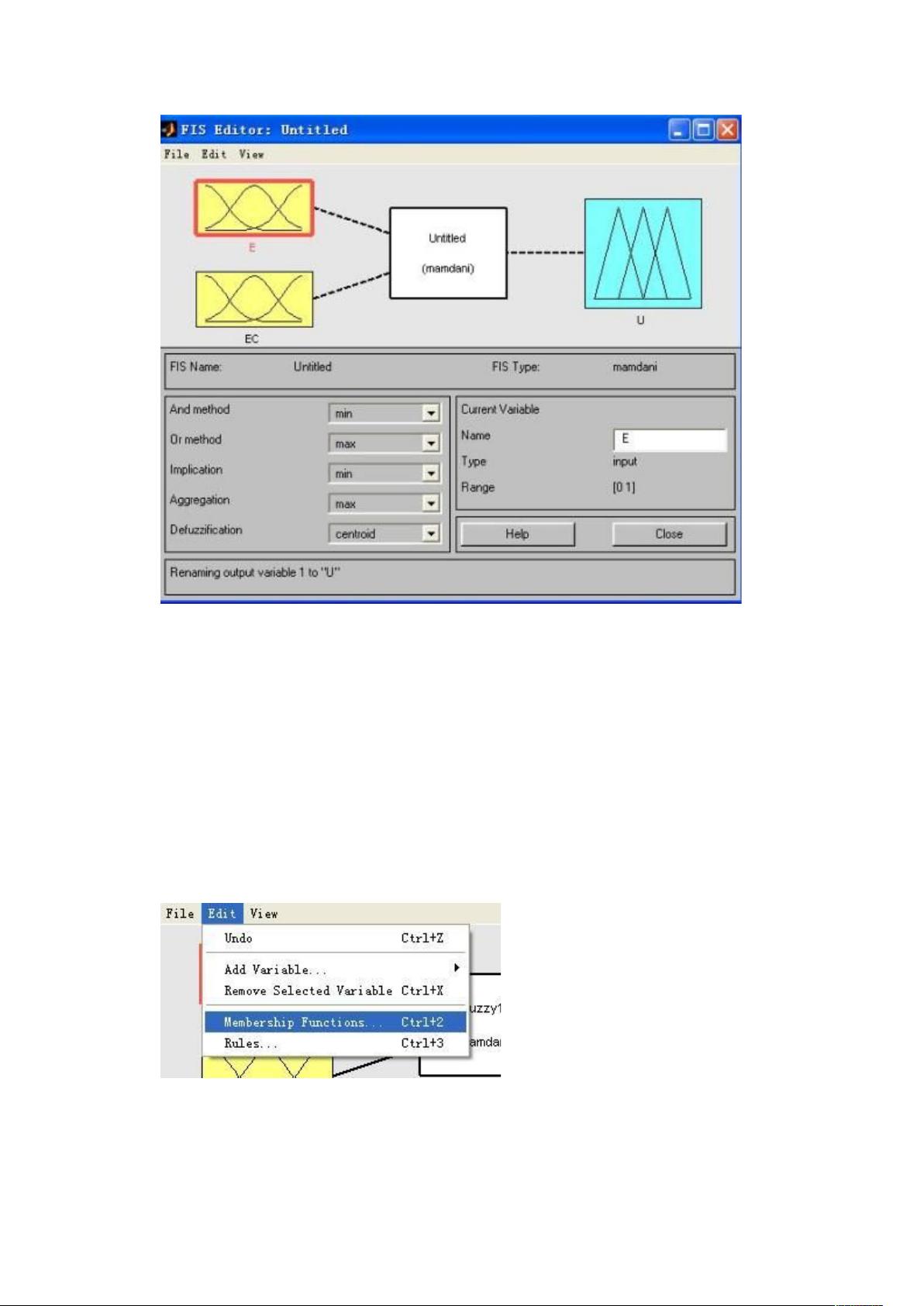
这里我们可以选取标准的二维控制结构,即输入为误差 e 和误差变化 ec,输
出为控制量 u。注意这里的变量还都是精确量。相应的模糊量为 E,EC 和 U,我们
可以选择增加输入(Add Variable)来实现双入单出控制结构。
剩余6页未读,继续阅读
资源评论


爱吃苹果的Jemmy
- 粉丝: 85
- 资源: 1133

下载权益

C知道特权

VIP文章

课程特权
开通VIP









最新资源
- 前端微信小程序rsa加密兼容处理
- 清华大学104页《DeepSeek:从入门到精通》
- 51单片机的实时操作系统(RTX51)示例代码
- wpDiscuz 高级版 v7.6.28 -WordPress 评论插件(+ 附加组件)
- 基于Java语言的程序员成长笔记与设计源码分享
- exe转window服务,带详细说明
- Android Studio Ladybug Feature Drop Patch 2(android-studio-2024.2.2.15-mac-arm.zip.002)
- IVMS-4200 3.11.1.5
- Android Studio Ladybug Feature Drop Patch 2(android-studio-2024.2.2.15-mac-arm.zip.001)
- Android Studio Ladybug Feature Drop Patch 2(android-studio-2024.2.2.15-windows-exe.zip.002)
- 基于EMD-ARMA算法的风光出力预测方法:分解重构原始数据,精准预测风光功率结果,基于EMD-ARMA算法的风光出力预测方法:分解重构原始数据,精准预测风光功率结果,基于EMD-ARMA的组合风光出
- centos7安装教程.docx
- 基于扩展卡尔曼滤波算法的锂电池SOC估计:在多种工况下的二阶等效电路模型应用,基于扩展卡尔曼滤波算法的锂电池SOC估计在多种工况下的应用研究-基于二阶等效电路模型,锂电池SOC估计 扩展卡尔曼滤波算
- “路网配电网与应急电源优化配置策略:提升系统抵抗力和恢复力研究”,基于极端事件双重破坏性的路网配电网应急电源优化配置模型与出行策略优化研究,路网配电网 应急电源 优化配置 以提升电力系统的抵抗力和
- Vue3 + Vite2 + Vue-Router4 + Element-Plus + Echarts + Axios 开发的后台管理系统 基于 Spring Boot 和 Vue 以及相关技术栈开发
- DeepSeek全方位使用技巧与应用指南
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


