PID 控制
控制控制
控制——比例控制
比例控制比例控制
比例控制、
、、
、积分控制
积分控制积分控制
积分控制、
、、
、微分控制
微分控制微分控制
微分控制及
及及
及手动调谐控制器
手动调谐控制器手动调谐控制器
手动调谐控制器 PID 参数
参数参数
参数
一
一一
一、
、、
、比例控制
比例控制比例控制
比例控制(P) (Proportional control action)
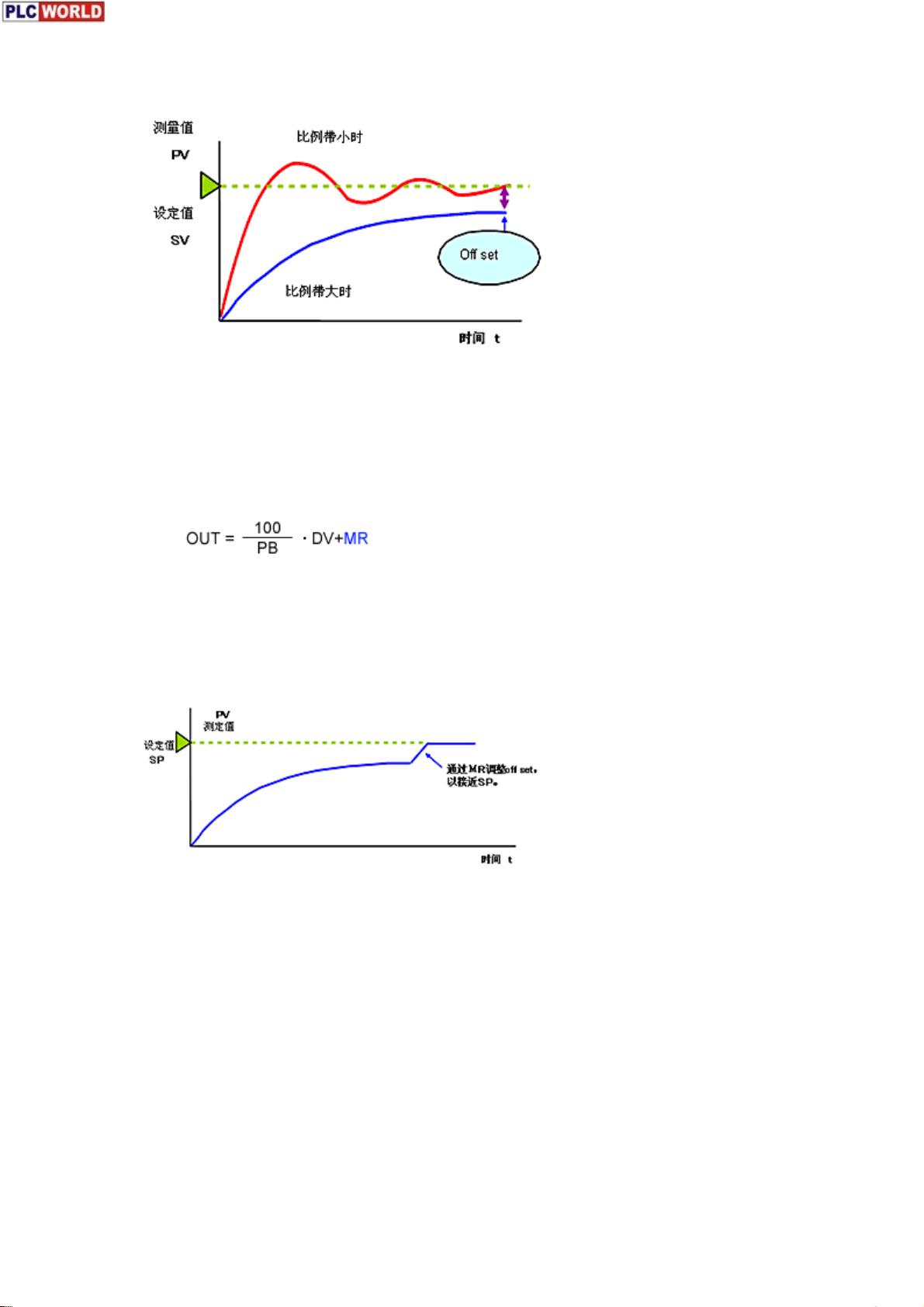
比例控制(P)是一种最简单的控制方式。其控制器的输出与输入误差信号成比例关系。根据设备有所不同,比例带一般为 2~10%(温
度控制)。但是,仅仅是 P 控制的话,会产生下面将提到的 off set (稳态误差),所以一般加上积分控制(I),以消除稳态误差。
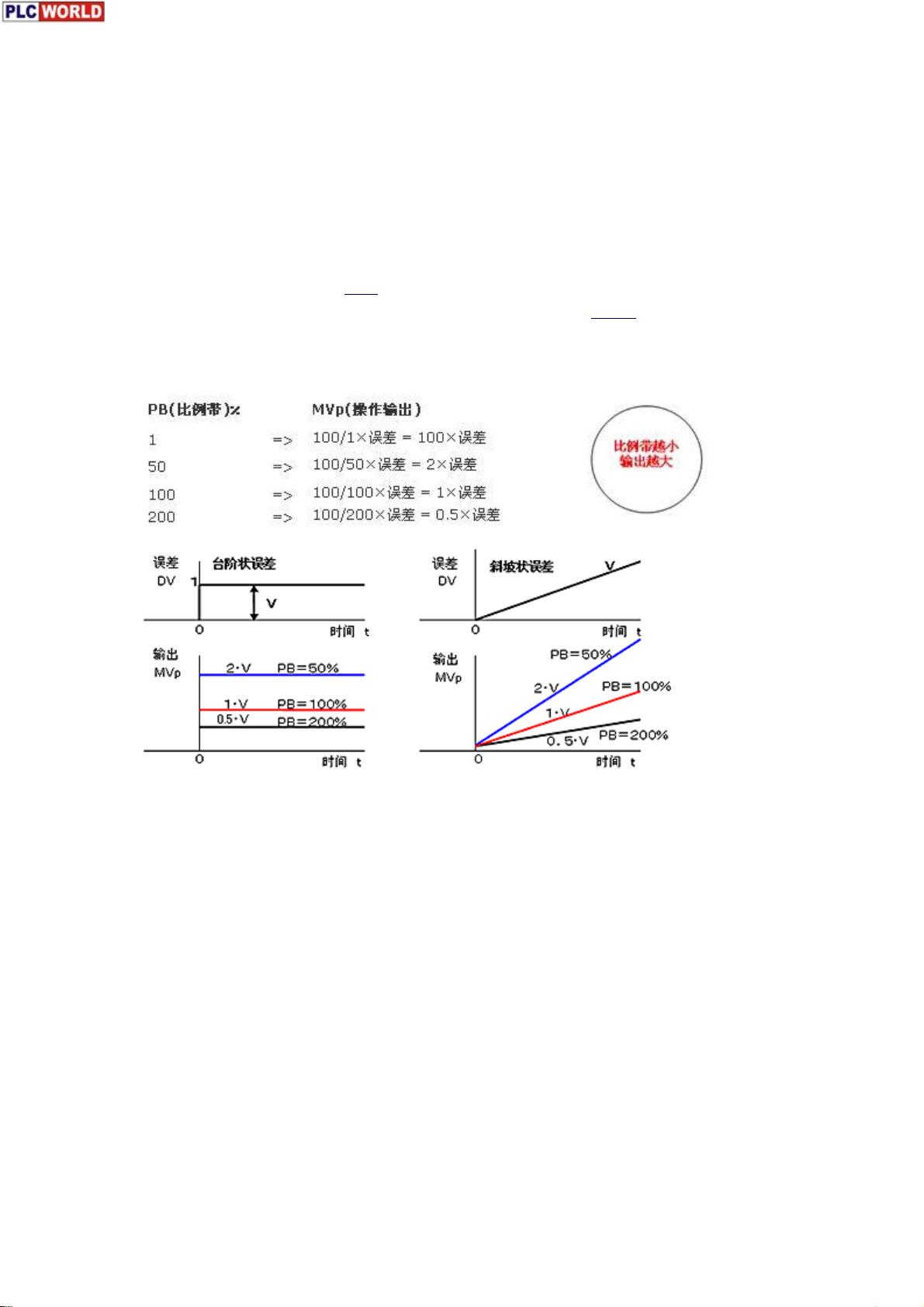
比例带与比例控制(P)输出的关系如图所示。用 MVp 运算式的设定举例:
图
2
:比例带与输出的关系。
稳态误差
稳态误差稳态误差
稳态误差(Off set)
比例控制中,经过一定时间后误差稳定在一定值时,此时的误差叫做稳态误差(off set)。仅用比例控制的时候,根据负载的变动及设
备的固有特性不同,会出现不同的稳态误差。负载特性与控制特性曲线的交点和设定值不一致是产生稳态误差的原因。比例带小时不
会产生。为消除稳态误差,我们设定手动复位值--manual reset 值(MR),以消除控制误差。
www.plcworld.cn