
2010
年
6
月
第
28
卷第
3
期
西北工业大学学报
June
2010
Vo
l.
28
No.3
Journal
of
NorthwesternPolytechnical
UIÙversity
一种数字电动舵机的非线性
PID
控制算法研究
杨尧,王氏钢,闰杰
(西北工业大学航天学院,陕西西安
71
师
2)
要:文章介绍了一种非线性
PID
控制算法在数字电动舵机中的应用,利用跟踪微分器,获得输入
输出的位直跟踪误差和它们的微分误差,并对它们进行非线性组合完成非线性
PID
控制器的设计,并
在
Matlab
上进行了仿真同时进行了实际舵机控制的验证实验。仿真和实验结果表明通过该算法所设
计的舵机控制器,拉制动态性能好,稳态误差小,对系统内部非线性参数不确定性和外部负载变化有
较强的控制鲁挣障。
关键词:非线性
PID
控制,跟踪微分器,非线性组合,数字电动舵机
中图分类号:
V242.
5
文献标识码
:A
文章编号:
1000-2758
(20
1O
)03
oÛ
323
-04
舵机系统的性能对整个飞行器控制系统的性能
会产生重要的影响。现代高性能电动舵机具有高
速、大功率、微型化、高功能等优点为许多先进导弹
所采用如俄罗斯的蜡蛇
R77
空空导弹等
[1]
。
但是由于工艺、设计水平、成本等因素电动舵机
的非线性性较强,参数变化大,同时系统动态指标要
求却又不断提高,因此控制难度大,调参不易,对此
近年来,许多新理论新策略逐步应用于电动舵机系
统,并获得了良好的效果,但是一般都必须利用准确
的舵机模型或者至少部分参数准确的舵机模型,本
文在不依赖模型的情况下通过采用跟踪微分器,非
线性组合改造
PID
控制取得了较好的控制效果。
1
非线性
PID
舵机控制系统
传统电动
系统结构框图
1
所示。
~主
i
控制器问|驱动器←→
l
电机
反馈电位#
图
1
电动舵机系统框图
在传统
PID
控制中控制器直接采用输人信号输
收稿日期
:2
∞
9
-04-0
8
出信号的误差,再利用
PID
线性组合进行分段控制,
这样的控制对于内部非线性参数变化敏感,通常需
要重新调参,同时这种控制对于外部负载变化鲁棒
性差,动态特性变化大。
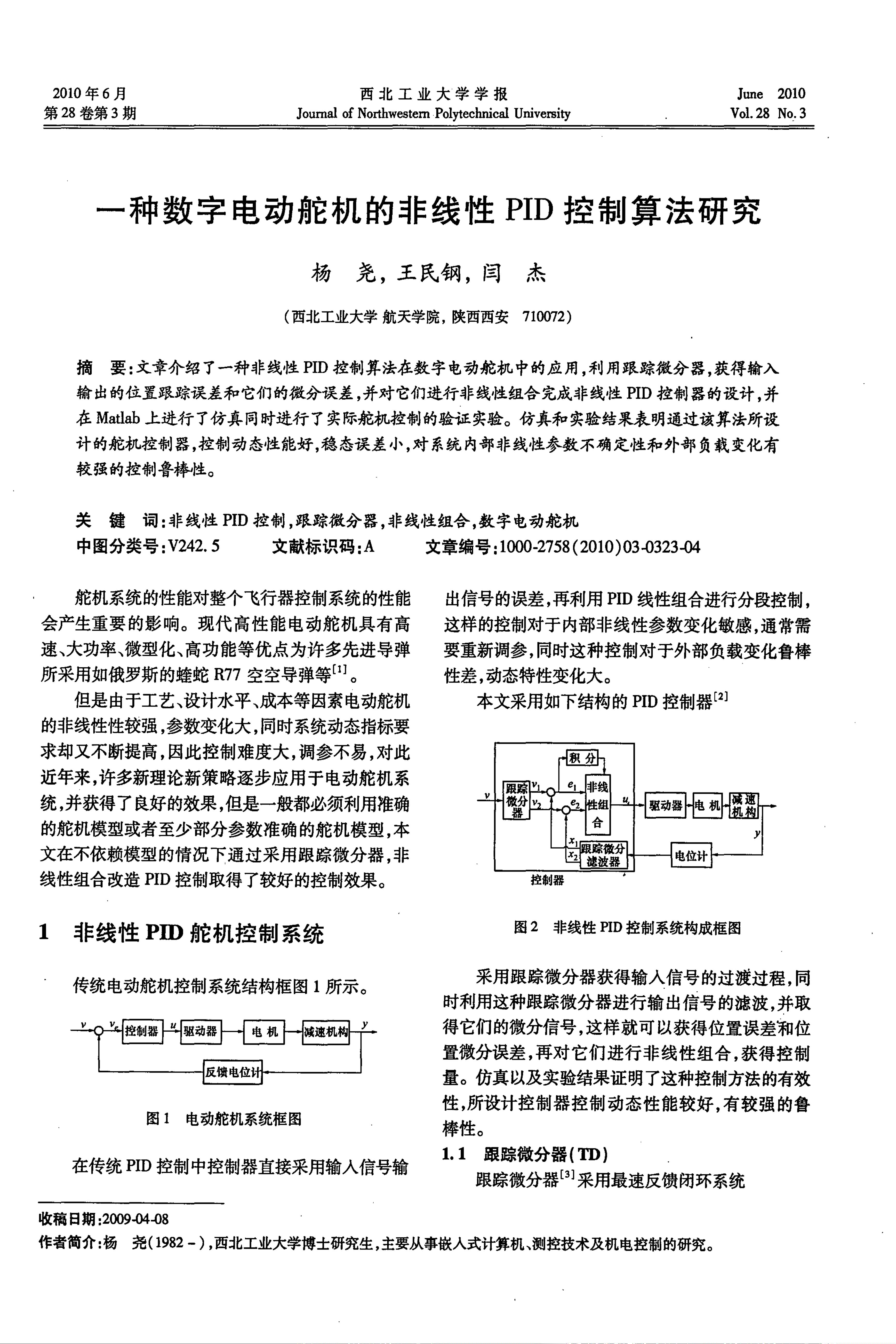
本文采用如下结构的
PID
控制器
[2]
电位计
图
2
非线性
PID
控制系统构成框图
采用跟踪微分器获得输人信号的过援过程,同
时利用这种跟踪微分器进行输出信号的滤波,并取
得它们的微分信号,这样就可以获得位置误差和位
置微分误差,再对它们进行非线性组合,获得控制
量。仿真以及实验结果证明了这种控制方法的有效
性,所设计控制器控制动态性能较好,有较强的鲁
棒性。
1.1
跟踪微分器
(TD)
跟踪微分器
[3]
采用最速反馈闭环系统
作者简介:杨
尧(1
982
-).西北工业大学博士研究生,主要从事嵌入式计算机、测控技术及机电控制的研究。
资源评论













