
一款电动车控制器电路的分析与改进一款电动车控制器电路的分析与改进
摘要:电动车在上坡时速度会减小而电流会增大,在由上坡驶入平路或下坡的情况下由于阻力突然减小甚至消
失,而驱动电流仍然较大,使得速度会快速增大,出现所谓的“过冲”现象。这给操作者带来不适且有一定的危险
性。为了减轻或消除“过冲”现象,从硬件和软件两方面做出改进。对于非“过冲”时使用“调速控制”,通过调整驱
动电流,力求使速度达到操作者通过转把设定的速度,并进行双闭环控制以克服复杂的路况变化。在“过冲”时采
用“定速控制”,依据速度信号来调整驱动电流,在设定的时间内使速度保持不变。 关键词:电动车;控制
器;过冲;改进;定速控制; 调速控制控制器作为电动车的关键部件,其技术日臻成熟,但是仍然有一
摘要:电动车在上坡时速度会减小而电流会增大,在由上坡驶入平路或下坡的情况下由于阻力突然减小甚至消失,而驱动
电流仍然较大,使得速度会快速增大,出现所谓的“过冲”现象。这给操作者带来不适且有一定的危险性。为了减轻或消除“过
冲”现象,从硬件和软件两方面做出改进。对于非“过冲”时使用“调速控制”,通过调整驱动电流,力求使速度达到操作者通过转
把设定的速度,并进行双闭环控制以克服复杂的路况变化。在“过冲”时采用“定速控制”,依据速度信号来调整驱动电流,在设
定的时间内使速度保持不变。
关键词:电动车;控制器;过冲;改进;定速控制;
调速控制控制器作为电动车的关键部件,其技术日臻成熟,但是仍然有一些问题有待解决。其中一个普遍的现象就是,电
动车在上坡时速度减小而电流增大。在由上坡驶入平路或下坡的情况下由于阻力突然减小甚至消失,而驱动电流仍然较大,使
得速度会快速增大,出现所谓的“过冲”现象。我们把这种现象叫做上坡“过冲”。这种情况会给操作者带来不适且有一定的危险
性。为了减轻或者消除这种现象,有必要对设计做些改进。
1 电路构成电路构成
使用无刷电动机的电动自行车控制器主要分为以使用专用控制芯片为的纯硬件电路控制器(例如以MC33035 为的控制
器)和以MCU 为的控制器(例如以AT89S2051、P87LPC767、STCl2C5410AD 等为的控制器)。采用的直流无刷电机多半
是三相电机,电角度有60°和120°两种。电机极数大部分为18 极,也有16 极、20 极等。
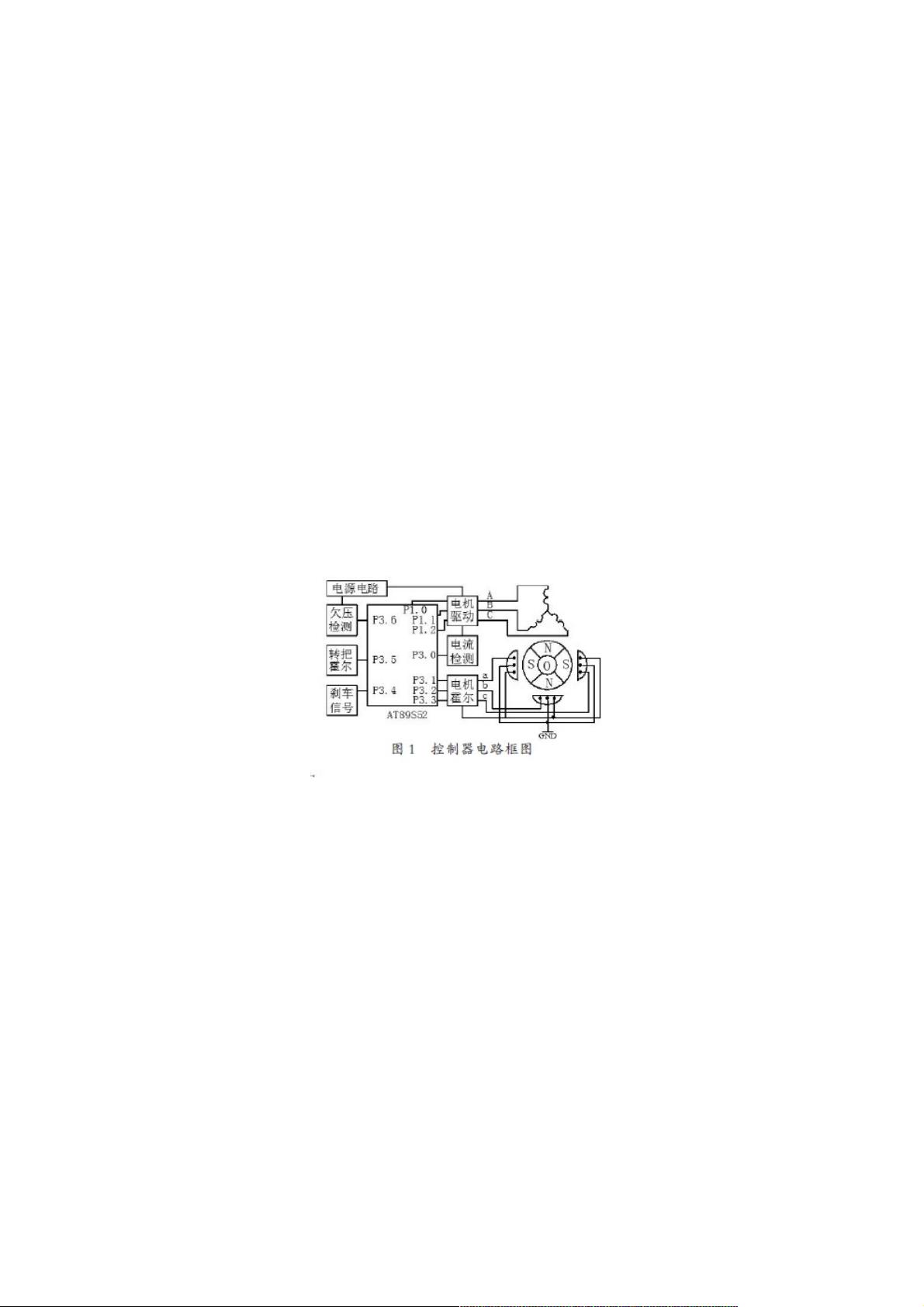
图1 是一款以AT89S52 为的一个控制器电路框图,电动机是电角度为120°直流无刷三相电动机。该电路中单片机接收电
源电压检测信号、刹车信号、电机电流检测信号、转把(调速)信号、电机转速检测信号、转子位置检测信号等,判断电动机
转速是否符合要求、三相绕组A、B、C 与位置信号a、b、c 之间的对应关系是否正确等,动态的输出PWM 形式的控制信号,
控制相应的功率驱动管的导通或关断,控制电动机的起动或停止、加速或减速等,并输出各种指示信号,如刹车信号、左转/
右转信号、欠压报警信号等。对于采用MCU 为的控制器,一般的是以软件编程来实现。
1)转把的形式、信号特征:转把(转速)信号是操作者发出的速度控制指令信号。此电动自行车使用“霍耳转把”。以5V
供电、正把、输出信号为1.1~4.2V。转动转把,改变了霍耳元件周围的磁场强度,也就改变了霍耳转把的输出电压。
2)闸把的形式、刹车信号特征:电动车闸把上有闸把位置传感元件,在捏刹车把动作时,将刹车信号传给控制器,控制
器接收到刹车信号后,立即停止对电机的供电。
3)直流无刷电机的驱动控制:参见图1,此电路采用三相无刷直流电机。3 个霍尔位置传感器的空间间距为120o,输出
信号a、b、c终送给单片机作为转子位置检测信号及测速信号。其中A 相末级电路如图2 所示,在驱动电路中设置了电流检
测。单片机根据霍尔转速信号和电流检测信号,经过分析判断,输出正确的PWM 控制信号给相应的线圈通电,从而控制电动
机的起动、停止及转速等。

weixin_38731553
- 粉丝: 4
- 资源: 899









最新资源
- C#源码 上位机 联合Visionpro 通用框架开发源码,已应用于多个项目,整套设备程序,可以根据需求编出来,具体Vpp功能自己编 程序包含功能 1.自动设置界面窗体个数及分布 2.照方式以命令触
- 几何物体检测42-YOLO(v5至v11)、COCO、CreateML、Paligemma、TFRecord、VOC数据集合集.rar
- 云计算全套课程资料.zip
- 基于cruise的燃料电池功率跟随仿真,按照丰田氢能源车型搭建,在wltc工况下跟随效果好,最高车速175,最大爬坡30,百公里9s均已实现 1.模型通过cruise simulink联合仿真,策略
- 材料进场验收台账样表.docx
- 建筑材料入库台账样表.docx
- 建筑材料复验台账样表.docx
- 建筑材料台账样表模板.docx
- 建筑材料送检台账样表.docx
- 建筑材料出库台帐模板.docx
- 建筑材料报验单(样表).docx
- 几何物体检测43-YOLO(v5至v9)、COCO、CreateML、Paligemma、TFRecord、VOC数据集合集.rar
- 几何物体检测44-YOLO(v5至v11)、COCO、CreateML、Paligemma、TFRecord、VOC数据集合集.rar
- C++语言实例-毕业设计项目:涂格子游戏开发,图形界面交互特点-开题报告,论文,答辩PPT参考
- python语言kssp批量下载爬虫程序代码QZQ3.txt
- IP102中分离出来的害虫数据集,使用Pasical VOC XML标注
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈



评论0