STM32的磁导航自主导引车通用驱动器设计

STM32的磁导航自主导引车通用驱动器设计的磁导航自主导引车通用驱动器设计
本驱动器采用STM32FV103作为主控芯片,辅以磁条传感器模块、RFID(射频识别)模块等外围模块构成了一
个完整的AGV底层控制系统,它可以满足多种磁导航AGV的控制要求。该驱动器已在3种不同功能的磁导航AGV
上成功运行,控制AGV完成了指定的任务,达到了一定的通用性。
引言
AGV系统在当前柔性制造系统(FMS)和自动化仓储系统中扮演着重要的角色。AGV具有适应性好、柔性程度高、可靠性
好、可实现生产和搬运功能的集成化和自动化等优点[1]。
AGV的导航方式主要有激光导航、电磁导航、视觉导航、GPS(全球定位系统)导航、磁导航等,本文主要针对磁导航方式
的AGV进行深入探讨,磁导航AGV主要是基于磁导航传感器感应贴在路面上的磁条进行路径跟踪并完成其自主行驶的功能。
磁导航传感器通过检测铺设在地面上的磁条来判断AGV与目标路径的偏差,然后输出电压模拟量[2]。对于磁导航AGV驱动器
的设计,为更好地满足通用性需求,需要对现有驱动器的组成单元进行总结和归纳,并且结合实际需求,找出共同点和不同
点,为磁导航AGV通用驱动器的设计找到突破口。
通过查阅相关文献,对磁导航AGV驱动器的组成有了一个总体认识,主要包括单片机单元、供电单元、手动控制单元、声光
报警单元、站点识别单元、工位检测单元、电机驱动单元、CAN总线单元、避障单元、磁导航单元、姿态反馈单元、通信单
元、安全辅助单元等 [35]。
1 驱动器硬件电路设计
在对磁导航AGV驱动器的组成单元进行分析之后,本文提出了一种基于STM32F103芯片为控制核心的通用驱动器,它包含以
下模块:单片机模块、电源模块、DI/DO模块、RFID读写模块、DAC输出模块、ADC采集模块、CAN总线通信模块、高速编
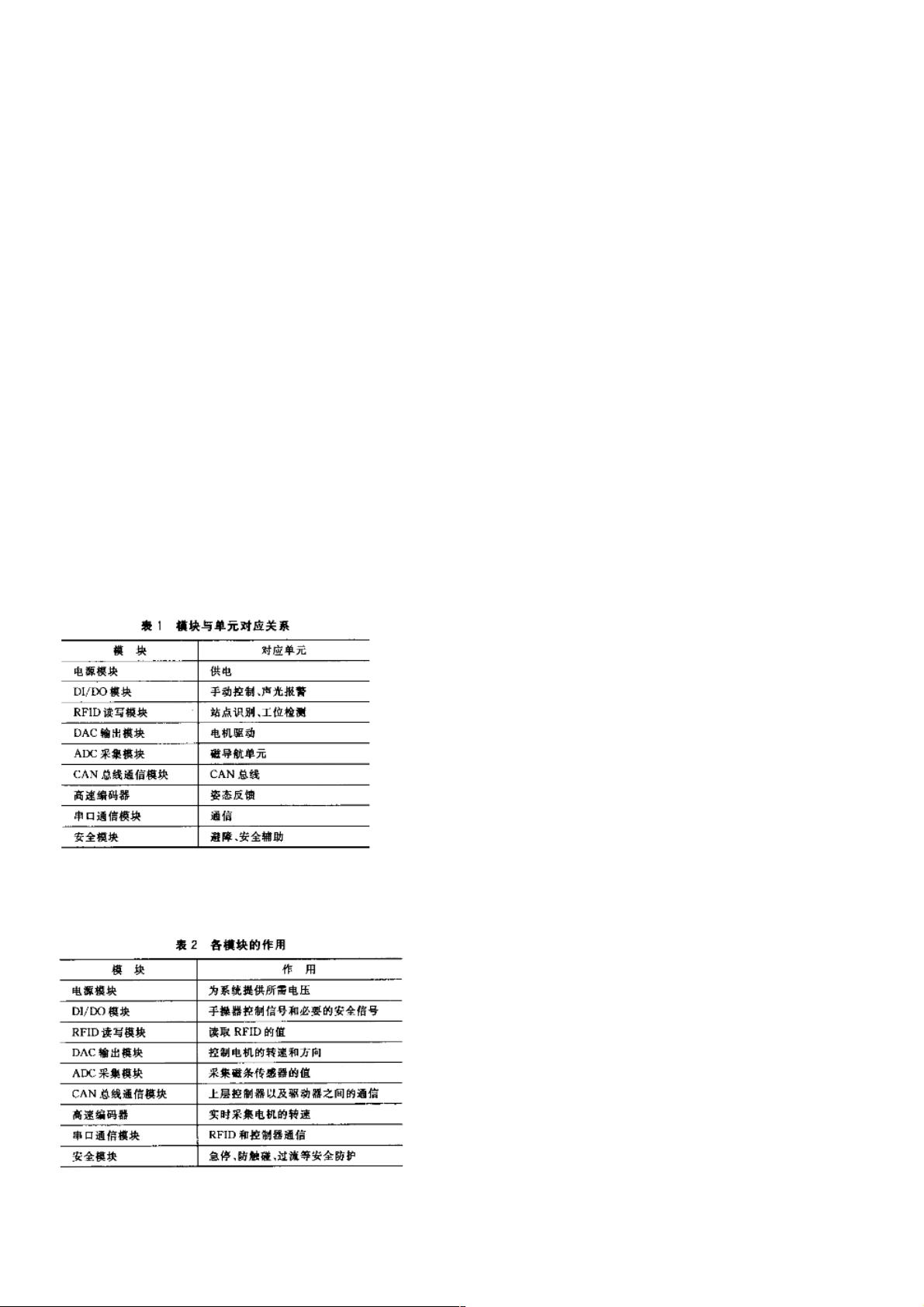
码器,安全模块以及串口通信模块,这些模块与磁导航AGV驱动器的组成单元之间的对应关系如表1所列。
由表1可以看出,提出的通用驱动器设计方案可以满足磁导航AGV对主要组成单元的需求。该驱动器可同时控制两个电机以及采
集相应的速度,还可同时采集两路磁条传感器输出的模拟电压,对于执行复杂功能的AGV而言,可以增加驱动器的数量以满
足要求,各驱动器之间可以通过CAN总线保持动作协调一致,共同完成指定的动作。
各个模块对应不同的功能和作用,各司其职,互相配合,完成指定的功能。各模块的主要作用如表2所列。
表2 各模块的作用
1.1 单片机模块
本设计采用STM32作为控制芯片,此芯片基于ARM CortexM3内核,具有高性能、低成本、低功耗的特点。另外,此芯片的
可移植性很好,并有许多官方函数库可以直接调用,大大缩短了开发周期。STM32F103系列有80个可以自由操控的芯片引






评论1
最新资源