
基于曲率尺度空间的角点检测图像匹配算法分析基于曲率尺度空间的角点检测图像匹配算法分析
计算机技术的发展下,优化提升图像匹配算法,可以提升图像检测精度。基于曲率尺度空间的角点检测图技
术,优化设计图像匹配算法,基于曲率尺度空间的角点检测算法进行图像特征点的提取,归一化处理特征点,
有助于提高图像匹配精度。利用该算法最终实现图像匹配需求,验证了算法的有效性,改进了图像匹配中特征
点过度分离的弊端,提高了图像匹配检测的整体精度约10.0%。该算法发挥了积极应用价值,值得在实践应用中
推广。
0 引言引言
针对我国的计算机信息技术中,
1 角点检测与图像匹配概念角点检测与图像匹配概念
1.1 角点检测的概念角点检测的概念
在图像匹配检测过程中,图像角点也被称作兴趣点,也就是在图像的像素点中,其相较于图像邻域各个方向中的灰度变化
量大,或者是大于阈值的点
[1]
。掌握图像的轮廓特征很有必要,因为找到图像特征就可以掌握图像中物体的形状。角点不仅包
含图像中的二维结构信息,同时,在处理图像匹配中,也可以应用角点检测技术,实现对图像匹配的处理
[2,3]
。角点所代表
的局部结构关系信息,不会因为视角的不同而改变图像轮廓上曲率的局部极大点作为角点
[4]
。而对于角点检测的原理,则是在
给定的模板以及图像中,找出图像所有区域中的相关性与相似性的点
[5]
。实现角点检测,最大的应用优点就是,具有图像旋转
不变性,不会因为图像旋转形态而改变检测精度,也不易受到外界光照条件的影响,提升应用价值。
1.2 图像匹配图像匹配
在计算机的图像匹配算法之中,在两幅图像匹配以及多幅图像匹配过程之中,通过图像匹配算法,就识别出在图像中存在
的同名点,并进行图像匹配
[6,7]
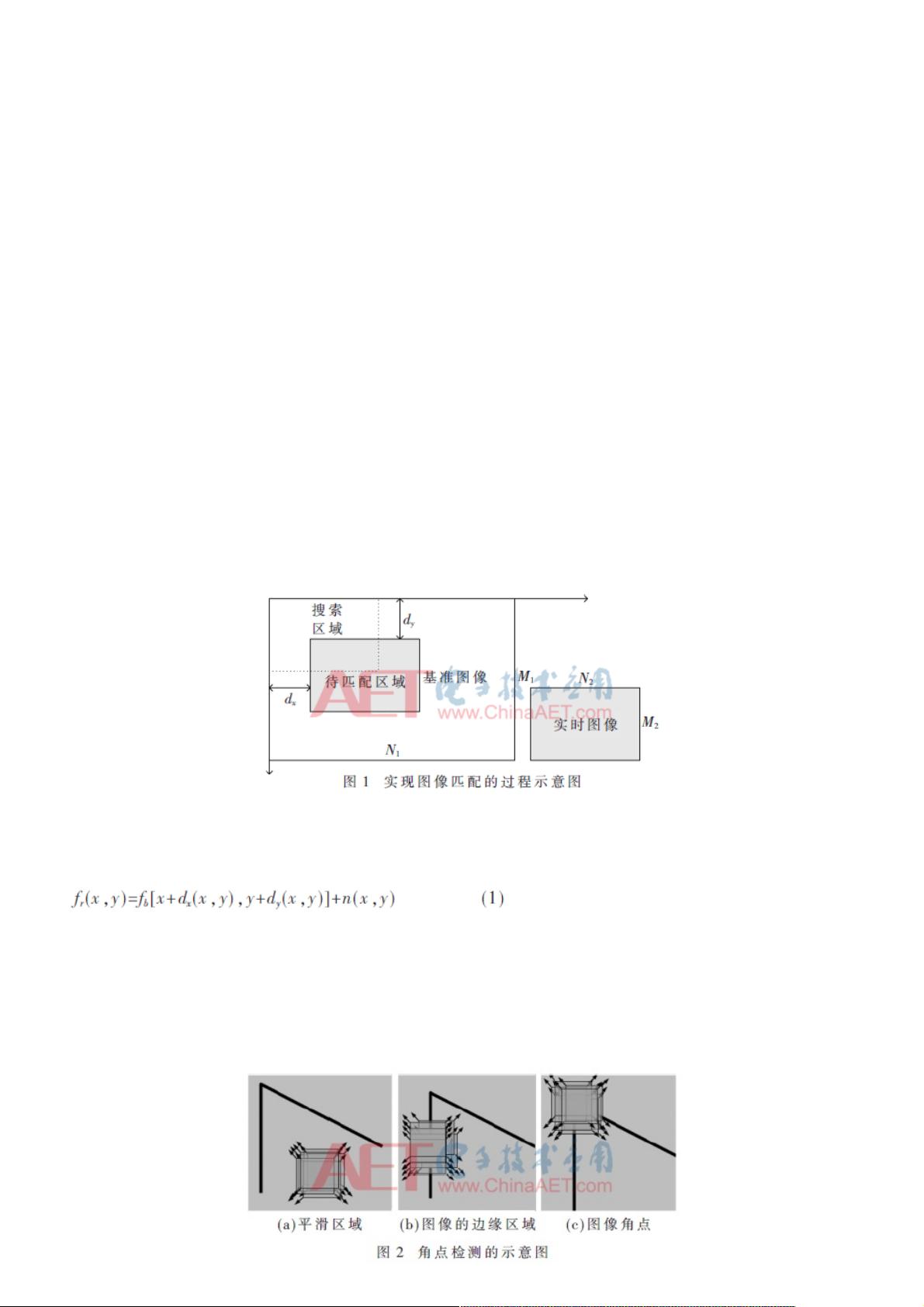
。在图像匹配中,当实时图像大于基准图像时,图像的匹配过程则是基于实时图像寻找基准
图像目标的过程。例如在地图系统的图像匹配中,基准图像比实时图像大,如图1所示。
图像匹配时,可以根据图像的颜色、纹理以及形状等
[8]
提取图像中的高层次特征,并建立不同匹配图像之间对应的匹配关
系。基准图像与实时图像之间的关系中,应用高斯白噪声表示d
x
(x,y),d
x
(x,y)、d
y
(x,y)表示图像特征点在X和Y方向位置
的偏差,其关系如下:
2 基于曲率尺度空间的角点检测算法基于曲率尺度空间的角点检测算法
2.1 角点检测角点检测Harris算法算法
角点检测Harris算法改进了Moravec方法的自相关矩阵
[9]
,可以在图像的检测匹配窗口中,通过高斯函数加权导数,有效避
免图像中特征点离散与偏移情况的发生,取代对图像处理中的简单求和算法,优化算法精度。图2是Harris角点检测算法的示
意图。
资源评论













