
用用51单片机制作双轮平衡车单片机制作双轮平衡车
本设计采用两块Cygnal公司推出的C8051F005单片机分别作为“双轮直立自平衡机器人”(以下命名为Sway)和
人机交互上位机的控制核心。车体倾斜角度检测采用AD公司推出的双轴加速度传感器ADXL202及反射式红外线
距离传感器。利用PWM技术动态控制两台直流电机的转速。上位机与机器人间的数据通信采用迅通生产的
PTR2000超小型超低功耗高速无线收发数传MODEM。
本设计的主要特色:
1. 高速(25MIPS)低功耗的SOC单片机为各种复杂算法的实现提供了保障,丰富的片内外设为高速数据采集及PWM调制信
号的生成提供了方便,片内温度传感器方便对温度的采集。片内JTAG功能为程序的调试及对系统的现场编程提供了方便。
2. 高效的H型PWM电路提高了电源的利用率,实现了电机的平滑变速。
3. 双轴加速度传感器及光电传感器的使用提高了车体倾斜角度检测的精度,差分算法的应用提高了系统的抗干扰能力。
4. 优化的软件算法,智能化的自动控制使车体运动准确平稳。
5. 高速的无线数据传输给各种远程数据采集和智能控制提供了保障。
6. 大屏幕液晶(蓝屏)显示及360度方向摇杆为人机交互提供了良好的界面。
一、 硬件方案的选择与论证
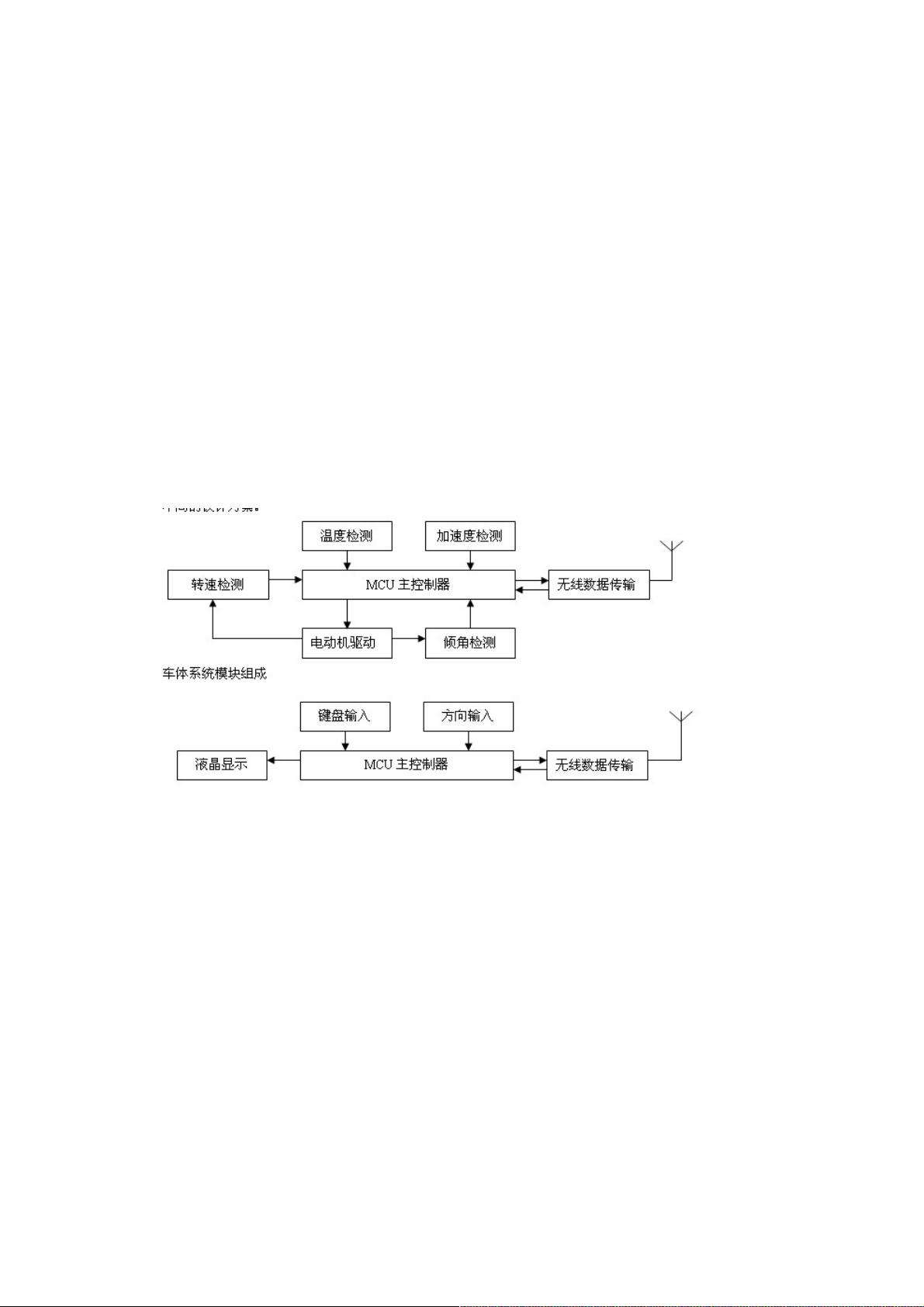
根据设计要求,系统可以划分为几个基本模块,如下图所示。对各模块的实现,分别有以下一些不同的设计方案。
<ignore_js_op>
无线控制上位机模块组成
1、 MCU主控制器
方案一:采用89S52单片机作为主控制器。优点:价格低廉,程序资源丰富,技术比较成熟。缺点:运算速度慢,很难担任复
杂算法的计算工作;程序储存空间小,不能储存大规模程序代码;数字外设少,片内没有模数转换器,不能直接进行数据采
集。
方案二:采用PHILIPS公司出品的LPC2119 ARM7内核处理器。优点:处理速度快(指令速度可达60MIPS),可以担任大部
分复杂算法的计算工作;片内外设非常丰富,可以进行实时数据采集,多种数据通信方式可供选择。缺点:价格昂贵,对于已
有51系列单片机开发经验的人员来说原有程序不兼容。
方案三:采用Cygnal公司推出的C8051F005单片机。优点:具有与8051兼容的微控制器内核,与MCS-51指令集完全兼容,
方便原有程序的移植。指令速度大大提高(最高25MIPS),可以担任复杂算法的运算工作。片内集成了一个12位100KSPS的
多通道ADC子系统,2个电压输出 DAC、2个电压比较器、片内电压基准,这为进行实时的数据采集提供了方便。片内具有4
个通用的16位定时器、一个具有5个捕捉/比较模块的可编程计数器 /定时器阵列(PCA),这为生成PWM信号给电动机调速提
供了方便,又不会过多占用CPU资源。片内拥有2304B内部数据RAM,32KB FLASH储存器,可以在系统编程与全速非侵入
式JTAG调试,这为生成大量程序代码和在线调试提供了保证。
基于上述理论分析,拟选择方案三。
2、 倾角检测
方案一:采用水银开关。优点:价格便宜,货源广泛,原理简单。缺点:输出开关量,不能线性调整。震动易受到干扰,很难
应用于高速高噪声场合。

剩余6页未读,继续阅读
资源评论













