
泊车辅助系统中的车位线自动检测与识别泊车辅助系统中的车位线自动检测与识别
针对目前泊车辅助系统中的车位线识别问题,建立了基于360°全景鸟瞰图像的全自动车位线检测与识别模型,
考虑到光照对图像处理结果的影响,先对图像进行了预处理,然后采用一种基于中值的自适应Canny边缘检测技
术,并通过Hough变换,再根据车位线特征的先验知识对Hough变换结果进行限制和优化,实现了车位线的识
别。同时对实际采集到的图像进行验证,结果识别率达到94.2%,证明了该方法的有效性和鲁棒性。
近年来随着对泊车辅助系统需求的快速增长,提出了多种车位定位的方法,这些方法大致可分为4类:基于用户界面的、基于
设施的、基于空闲位的和基于车位线的方法。与其他方法相比,基于车位线的方法有以下优势:(1)可以与基于用户界面的方
法结合使用来减少由于司机重复操作带来的不便,而这是基于用户界面方法的主要缺陷。(2)不同于基于空闲位的方法,它能
更准确地定位停车位,因为其定位过程不依赖于相邻汽车的停放姿势而仅依赖于车位线。(3)它也可以有效地应用于倾斜车位
的情况。由于传感器的局限性,运用超声波传感器基于空闲位的方法在倾斜车位的情况下会失效。(4)与应用双目或者运动声
波的基于空闲位的方法相比,它通常花费少量时间。(5)它不需要额外的传感器,例如立体摄像头、扫描激光雷达或者短波雷
达,而是运用后视摄像头。
基于车位线的方法可以分为半自动和全自动的方法。与全自动的方法相比,半自动的方法可能产生更可靠的结果,而且花费更
少的计算资源,因为它有来自人的额外信息。Jung等人提出了一种方法,这种方法需要司机在预停车位内标记一个点,然后
利用方向梯度来进行识别。实验验证这种方法只适用一种类型的车位。为克服此缺陷,提出了另外一种方法,可以识别各种类
型的车位,但需要用户更多的配合。这种方法需要用户输入车位两端点的初始位置,构成了车位的入口。基于这些初始位置,
采用人工神经网络和遗传算法进行车位的识别。
另外,全自动的方法也得到了发展。XU等人提出了一种基于颜色分割技术的的方法识别车位线,这种方法只能识别红色车位
线,而且基于颜色信息的方法已经被证明对光照变化是敏感的。Tanaka等人提出了一种对边缘片段运用RANSAC检测一组直
线来识别车位线。由于这种方法高度依赖于直线检测,其性能会因为部分污损而下降。Jung等人提出的方法将各种类型的车
位线模型化为一种分层树结构,基于这种结构完成自动识别。
但是,以上提出的方法都涉及到阈值,所以都会存在图像处理领域一个普遍的问题,即阈值设置过高,重要信息就可能被遗
漏;阈值设置过低,干扰信息又会被看的重要,因此一个适用于所有图像的普适阈值难以给出,所以针对以上问题,本文采用
了自适应的思想,包括自适应直方图均衡化、自适应二值化、自适应Canny边缘检测,以满足应用的需要,实验证明这些算法
都是有效的。
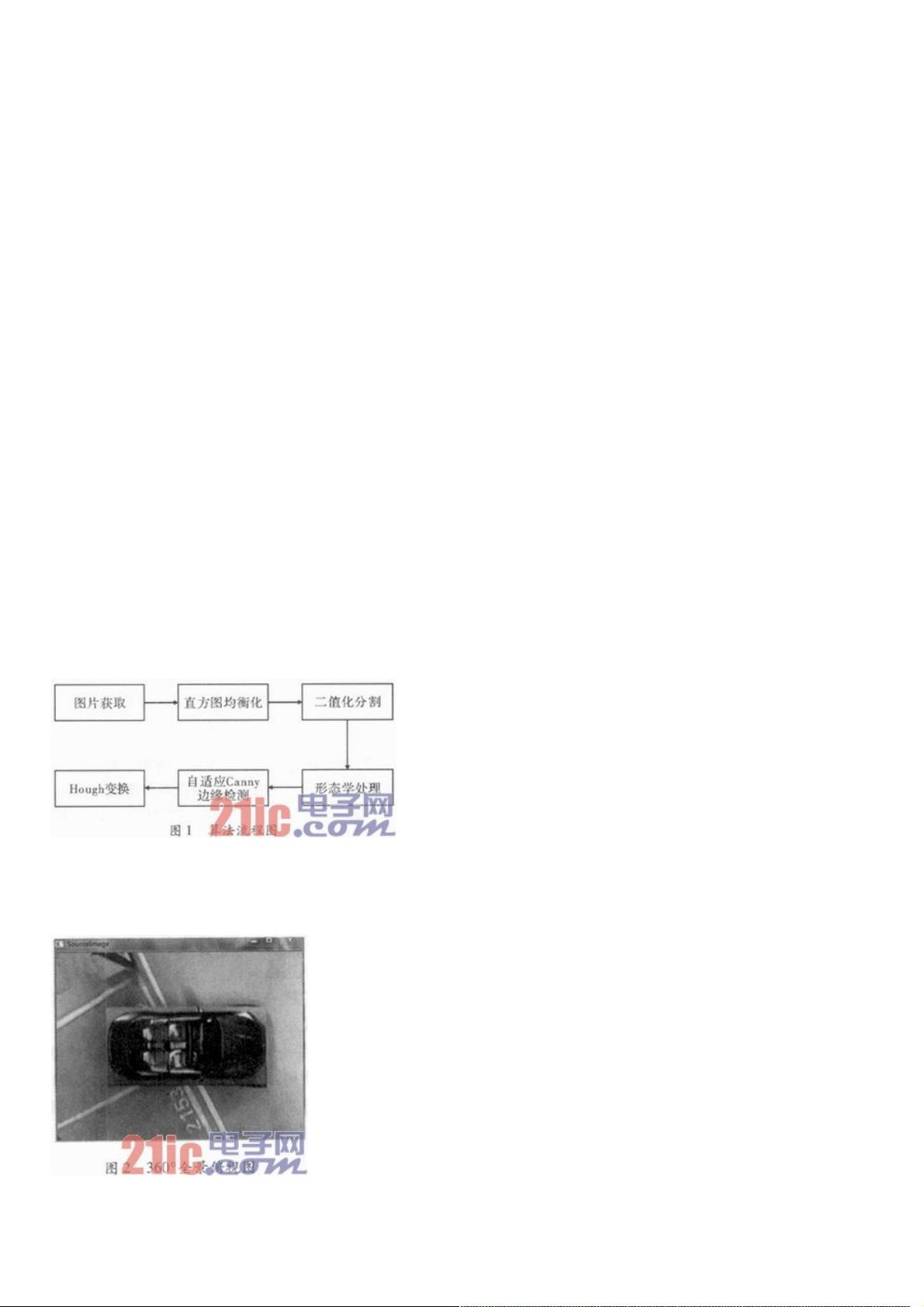
本文提出的方法可分为以下几个过程:对汽车前、后、左、右4个摄像头采集到的图像进行重建形成全景图像;图像预处理,包
括直方图均衡化,二值化以及形态学处理;Canny边缘检测以及Hough变换,然后在参数空间中利用车位线特征的先验信息对
结果进行优化,最终得出识别结果。具体算法流程如图1所示。
1 图像预处理图像预处理
通过加装在汽车车身前、后、左、右的4个鱼眼摄像头,同时采集车辆四周的影像,经过鱼眼图像矫正,鸟瞰变换和拼接后,
形成一幅车辆4周的360°全景俯视图,如图2所示。
由此得到的原图像不可避免地会受到光照、噪声等的影响,因为前期处理的质量直接影响到后期识别的效果,所以为消除图像
中无关的信息,恢复有用的真实信息,增强有关信息的可检测性和最大限度地简化数据,从而改进特征抽取、图像分割、匹配
和识别的可靠性,需要对图像进行预处理,主要分为以下几个步骤。
资源评论


weixin_38699724
- 粉丝: 6
- 资源: 933









最新资源
- bdwptqmxgj11.zip
- onnxruntime-win-x64-gpu-1.20.1.zip
- vs2019 c++20 语法规范 头文件 <ratio> 的源码阅读与注释,处理分数的存储,加减乘除,以及大小比较等运算
- 基于Kotlin语言的Android开发工具类集合源码
- 零延迟 DirectX 11 扩展实用程序.zip
- 基于Java语言开发的航空公司营业系统设计源码实现
- 基于Java的语音识别系统设计源码
- 基于Kotlin语言的XmlClassGuard插件设计源码,助你轻松混淆四大组件与自定义View,轻松上架Google Play
- 基于Java实现的多租户博物馆数据隔离设计源码
- 基于Java语言的Q7智能秤扫码称重体积测量设计源码
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


