
基于基于STM32的机器人自主移动控制系统设计的机器人自主移动控制系统设计
针对类车机器人自主移动的问题,首先在非完整约束系统下建立类车机器人低速移动过程的运动学模型和动力
学模型,选用适合基础性类车移动机器人研究的自行车模型进行状态分析;在混合式体系结构下用STM32作为
机器人自主移动控制系统的核心,给出控制系统框图,完成硬件设计;同时完成环境定位与建图,构建动态贝
叶斯网络,最终综合实现类车机器人自主移动的功能。
沈友建,黄孝鹏,肖建东,陈煊之
(山东科技大学 电气与自动化工程学院,山东 青岛 266590)
摘要:摘要:针对类车机器人
关键词:关键词:自主移动;运动学模型;
0引言引言
从2013年德国提出“工业4.0”开始,机器人的智能化过程将会越来越迅速,而“人机协作、与人共融”是下一步机器人产业亟
待解决的难题,目前的工业机器人或专业服务机器人的移动能力都不够完善,操作方式不够灵活,自主化程度也都不高。
基于以上在机器人领域出现的新情况和遇到的新问题,本文对基于STM32的机器人自主移动技术研究进行简单的论述。
本文的研究对象为类车移动机器人,为论述简洁,下文中出现的机器人、移动机器人都代指类车移动机器人,不另注明。
类车移动机器人自主移动是指在无人操作情况下,在随机环境中,为完成特定事件或一系列动作,通过机器人自身搭载的
控制系统并应用环境感知技术进行多种数据信息的处理,最终实现机器人的自主决策、独立执行,要求是能够躲避各种随机障
碍、规避潜在风险[1]。目前,类车机器人自主移动的主要功能需求为:(1)在未知环境中实现自身定位,并进行环境感
知与建图;(2)未知环境下的整体规划与行为决策;(3)搭载具有学习进化能力的机器人移动控制系统设计;(4)各机器
人之间实现网络化、协同化;(5)最终目的是实现“人机协作、与人共融”。
本文论述的机器人自主移动技术分为3个部分:(1)机器人低速自主移动数学模型的建立;(2)基于STM32的控制系统
设计;(3)机器人自主移动
1移动过程中机器人建模移动过程中机器人建模
在类车移动机器人受非完整约束的条件下建立其低速自主移动数学模型,包括低速移动运动学模型和动力学模型,同时引
入自行车模型来简化对自主移动机器人建模的问题。
1.1非完整约束和完整约束非完整约束和完整约束
完整约束和非完整约束是构成系统约束的全部内容。完整约束(Holonomic Constraint)是指系统约束方程中不含确定系
统位置的坐标的微商,或虽含坐标的微商但不利用动力学方程就可直接积分成为不含坐标微商的约束;非完整约束
(Nonholonomic Constrain)是指系统约束方程中含有确定系统位置的坐标的微商且不利用动力学方程不能直接积分为不含
坐标微商的约束,非完整约束包括运动约束和动态约束两种[2]。类车移动机器人就是典型的受非完整约束的系统,简称非
完整系统。
1.2移动机器人的数学模型移动机器人的数学模型
对于移动机器人,为了对其运动特性进行分析、整理和优化,需要建立经过合理简化和抽象的数学模型。本文采用运动学
模型和动力学模型对类车移动机器人进行建模分析研究,通过这种模型,研究类车移动机器人在时间、空间中的运动规律并进
行控制系统设计。
根据现有移动机器人情况的统计研究,大多数移动机器人速度都低于30 km/h,而在转弯的过程中机器人还会有减速过
程,在这种低速转弯的过程中,侧向加速度会很小,因此认为移动机器人的轮子相对于地面满足非完整约束。如图1所示,此
时类车移动机器人的瞬时转向中心一直位于机器人后轴的横向延长线上,也就是说后轴上各点的速度方向始终垂直于后轴,而
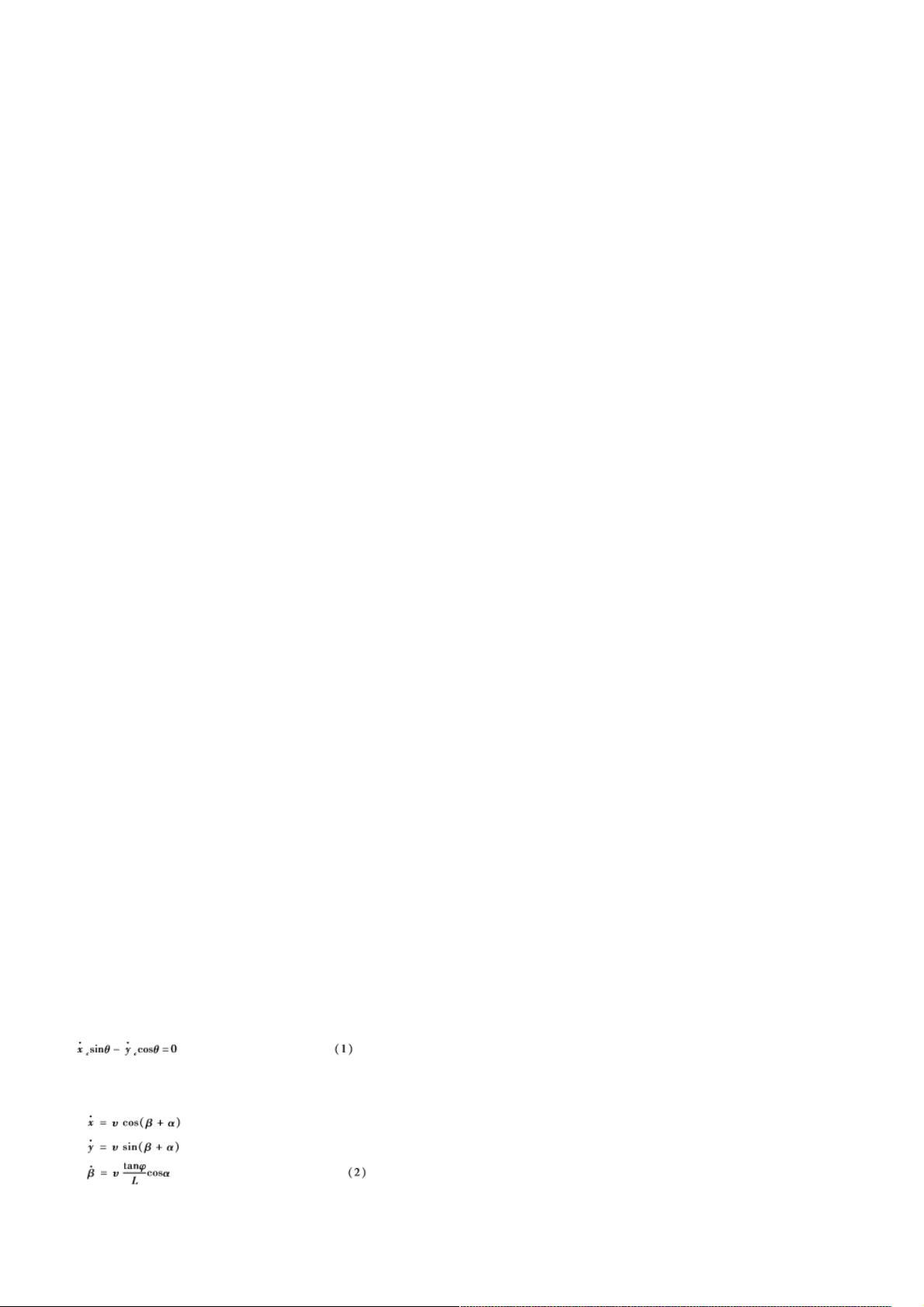
整个后轴及后车轮在横向轴心方向上速度为零,这就是类车移动机器人的非完整约束。即对于机器人后轴各点处的速度应该满
足如下要求:
其中,xc、yc代表机器人后轴上各点的坐标。此种情况下,对机器人质心列写运动学方程组如下:
其中,υ为整体质心速度;L为前轴到后轴的距离;α为机器人的质心侧偏角;β为机器人的横摆角。因为类车移动机器人
受到的是非完整约束,必须使用关于这些约束的相应的广义坐标,所以在图1中,x和y为机器人各部分质点所属质点系质量分
布的平均位置在广义坐标系下的坐标;R为机器人瞬时转弯半径;S为后轴长度;p、q为机器人质心分别距前轴和后轴的距
资源评论


weixin_38685831
- 粉丝: 8
- 资源: 874









最新资源
- 基于Comsol三次谐波的物理现象,大子刊NC复现报告:手性BIC超表面下的远场偏振与手性透射图示分析-电场、二维能带图解读及Q因子图展现所见即所得的光学效应 ,平面手征超表面研究:连续介质中的三次
- 人工智能&深度学习:LSTM 文本分类实战 - 基于 THUCNews 数据集的 Python 源码资源(源码+数据集+说明)
- MATLAB程序专为非全向移动机器人设计的扩展卡尔曼滤波(EKF)数据处理工具箱,精准融合ADS-B与GPS数据,高效状态估计解决方案,MATLAB程序优化:非全向移动机器人EKF状态估计与飞行数据处
- 简易图像处理软件,与PS工具类似
- iOS swift工具类使用
- AR.js 完整资源包,可以完整的引用
- 西门子PLC与三台欧姆龙温控器通讯程序:实现温度控制及监控,支持轮询通讯与故障恢复功能,PLC与触摸屏集成设置温度,支持扩展及详细注释 ,西门子PLC与三台欧姆龙温控器通讯程序:实现温度控制及监控,支
- 这份文档的内容并非技术性文章,而是一段歌词片段,无法按照技术文档的要求生成标准标题 若需要总结,该文档包含了一段歌词,表达了关于期待与未知相遇的主题 但由于内容不足以及非技术性质,无法提供更详细总
- .safetensors转换成.GGUF所需工具cmake
- 三相光伏并网逆变器仿真:PV升压逆变并网系统中的电压电流双环控制与SVPWM策略研究,三相光伏并网逆变器仿真研究:PV光伏boost升压逆变并网系统之电压外环与电流内环SVPWM控制机制探讨,三相光伏
- 《基于信捷PLC的7轴伺服插补联动设备的设计与实现-喷涂机程序与牵引示教功能》,信捷PLC驱动7轴伺服插补联动设备-XD5-48T6-E牵引示教功能与喷涂机程序解析,信捷PLC7轴伺服插补联动XD
- MPC模型预测控制:从原理到代码实现,涵盖双积分、倒立摆、车辆运动学与动力学跟踪控制系统的详细文档与编程实践,MPC模型预测控制原理到代码实现:双积分、倒立摆、车辆运动学与动力学跟踪控制案例详解,mp
- 车路协同C-V2X港口应用分析
- gradle-6.1.1.zip资源下载
- 用dockerfile打包带有nginx-monitor-vts模块的nginx镜像
- .safetensors转换成.GGUF所需工具ccache
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


