MATLAB中的机械臂算法——动力学

MATLAB中的机械臂算法中的机械臂算法——动力学动力学
机械臂的动力学
正向运动学指的是在已知机械臂各个关节角度的情况下,推算end-effector(机械臂终端)的位置和方向(合称pose)。反向
运动学指的是在已知end-effector的位置和方向,推算各个机械臂的关节角度。我们主要研究反向运动学。
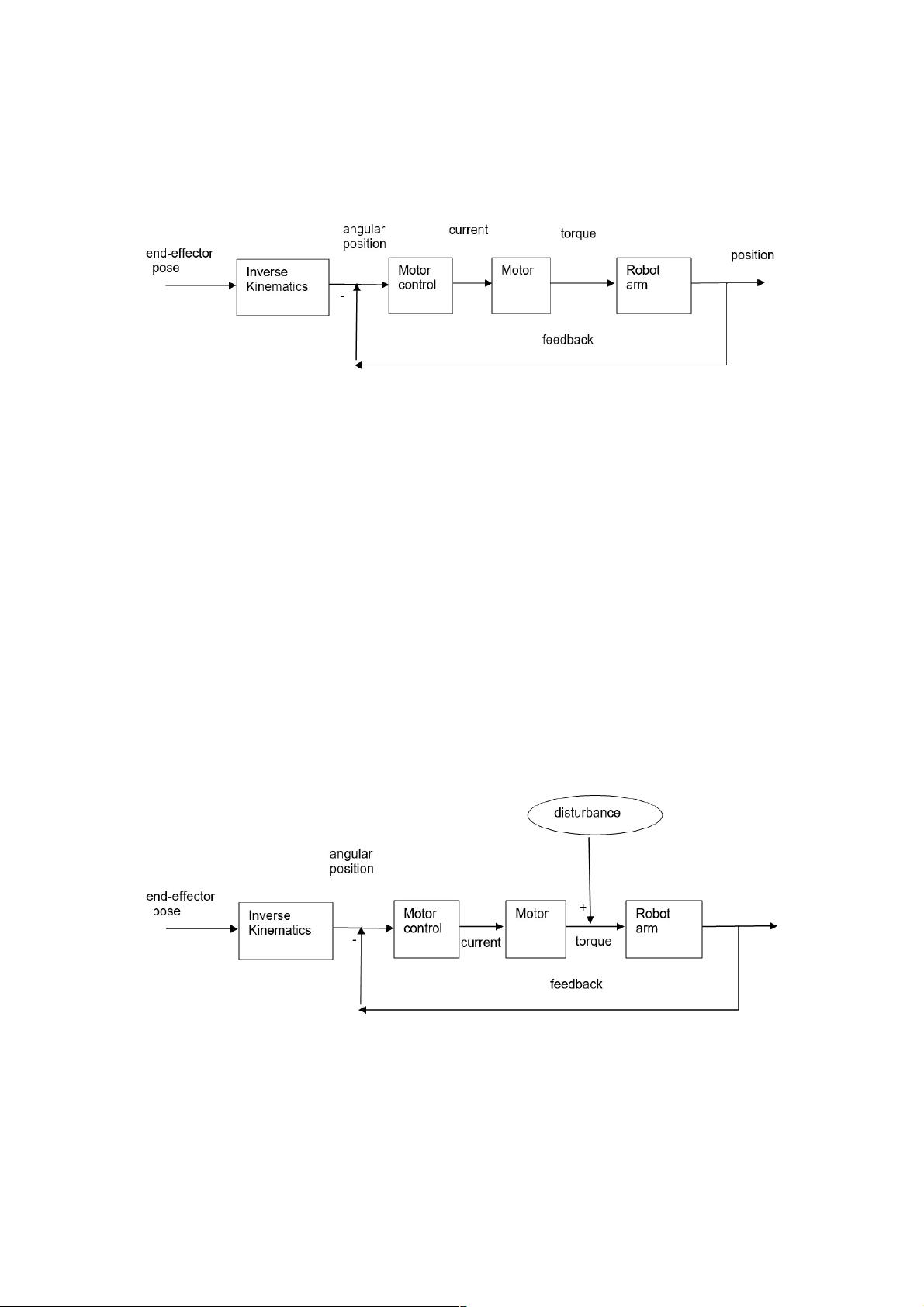
让我们看一下基于反向运动学的控制逻辑图:
在给出机械臂的end-effector的pose后,反运动学模块计算出各个关节所需要的角度,然后通过电机产生力矩(torque)去执行。
在此期间,通过反馈(feedback)去消除一些控制误差。
但是,事实上会有很多的干扰因素存在。例如:
地球引力(gravity)
惯量(inertia)
摩擦力(friction)
科里奥利力和离心力(Coriolis and centrifugal)
由于连杆之间是通过关节(joint)耦合在一起,连杆之间会有反作用力和反向惯量
以及一些人为的要求,例如:
我们想要机械臂运动的速度,按照我们预先的设定运行(velocity and acceleration)
我们想要求机械臂在触碰外物时候做出安全保护(external force)
这些我们暂且称之为disturbance(干扰),当然有些“干扰”是我们故意要求的,比如说需要按照预设轨迹的速度运行。加
入“干扰”后的示意图如下:
如果我们能提前计算出来这些“disturbance”,然后在控制环路中将它“抵消”(有时候也叫前馈控制)。这样,就能使得机械
臂“完美”运行了。让我们再改一下控制逻辑图:

weixin_38685608
- 粉丝: 1
- 资源: 996









最新资源
- 沈丘盛世龙门图纸符合规范化
- HM3400-VB一款N-Channel沟道SOT23的MOSFET晶体管参数介绍与应用说明
- 基于python+streamlit联邦学习进行高校学生成绩预测研究python源码+项目说明+模型+数据.zip
- HM3400D-VB一款N-Channel沟道SOT23的MOSFET晶体管参数介绍与应用说明
- HM3400B-VB一款N-Channel沟道SOT23的MOSFET晶体管参数介绍与应用说明
- spring-boot示例
- 搜集火星资源.py
- JAR应用启动停止脚本化解决方案.zip
- 配合eclipse svn插件subclipse-4.3.4版本的javahl
- Bash脚本教程:如何优雅地停止JAR服务.zip
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈



评论5