

第 26 卷第 1 期
2009 年 1 月
控 制 理 论 与 应 用
Control Theory & Applications
Vol. 26 No. 1
Jan. 2009
仿仿仿生生生波波波动动动长长长鳍鳍鳍运运运动动动学学学建建建模模模及及及算算算法法法研研研究究究
胡天江
1
, 沈林成
1
, 李 非
2
, 王光明
1
, 韩小云
1
(1. 国防科技大学 机电工程与自动化学院, 湖南 长沙 410073; 2. 国防科技大学 计算机学院, 湖南 长沙 410073)
摘要: 长鳍波动推进鱼类在稳定性、机动性、低速下状态保持等方面较其它鱼类有着显著优势. 本文将鱼类波动
长鳍抽象为零厚度理想波动面, 引入直纹面建立曲线坐标意义下波动长鳍的运动学模型, 描述了长鳍波动推进时的
非等幅波动、非对称波形等运动特征. 面向理论分析和数值模拟, 进一步扩充直纹面模型, 使之满足弯曲基线、非零
厚度等长鳍形态及运动特征, 进而建立笛卡尔坐标系下的长鳍波动描述方程, 相应地, 设计了鱼类长鳍波动推进的
运动描述算法. 根据给定形体和运动参数, 对零厚度理想波动板和弓鳍目“尼罗河魔鬼”鱼进行运动学仿真, 验证
了运动学模型及运动描述算法的有效性.
关键词: 波动长鳍; 直纹面; 运动学模型; 波动描述算法; “尼罗河魔鬼”
中图分类号: TP273 文献标识码: A
Kinematic modeling and motion algorithm for long undulatory fins
HU Tian-jiang
1
, SHEN Lin-cheng
1
, LI Fei
2
, WANG Guang-ming
1
, HAN Xiao-yun
1
(1. College of Mechatronic Engineering and Automation, National University of Defense Technology, Changsha Hunan 410073, China;
2. College of Computer, National University of Defense Technology, Changsha Hunan 410073, China)
Abstract: Studies have shown that undulatory propulsion with long fins has advantages in stability, maneuverability, and
low-speed retaining. By using the differential geometry, we develop a rules-surface-based kinematic model for a zero-depth
fin. This model characterizes the undulatory properties, including the non-uniform height and the non-uniform amplitude.
It has also been studied in-depth in Cartesian coordinates to reflect the curve-based and non-zero-depth properties. The
corresponding undulation algorithm is proposed and implemented in the dynamic mesh analysis of computational fluid
dynamics (CFD). To validate the effectiveness and feasibility of the proposed undulatory model and algorithm, simulations
of an ideal zero-depth waving plate and the Gymnarchus niloticus (a freshwater fish which is pushed forward by undulations
caused by a long dorsal fin) are given respectively, with specified morphological and undulatory parameters. This study
may serve as a good platform for dynamic analysis of undulations.
Key words: the long undulatory fins; ruled surface; kinematics; the undulation algorithm; Gymnarchus niloticus
文文文章章章编编编号号号: 1000−8152(2009)01−0001−07
1 引引引言言言(Introduction)
近20多年来, 受自然界鱼类游动的快速性和高效
性启发, 仿鱼推进技术已成为水下机器人领域的研
究热点之一
[1∼3]
. 通过深入研究鱼类的推进机理, 揭
示鱼类高效游动的奥秘, 为研制高效率、低噪音、高
机动性、高稳定性和易隐蔽的仿生航行体提供新的
思路. 可见, 鱼类游动机理分析和仿鱼推进装置研制
是仿鱼推进技术研究的重要内容. 运动学建模是衔
接机理分析和装置研制的有机体, 它既对游动特征
和仿生启示进行形式化表达, 也为仿鱼推进装置研
制提供设计依据.
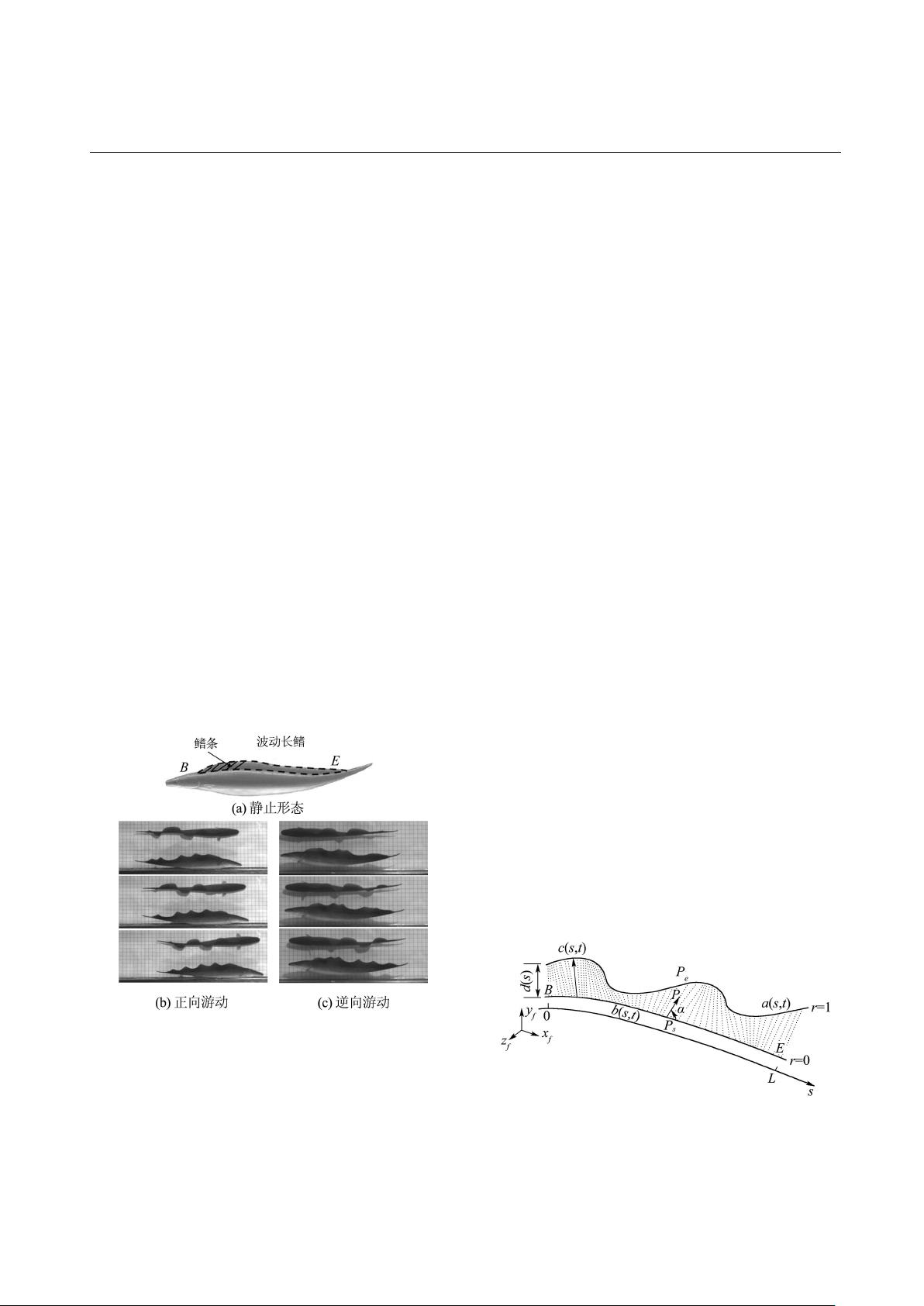
弓鳍目(Amiiform)、裸背鳗(Gymnotiform)等鱼类
游动时主要依靠长背鳍或长臀鳍波动产生推力,
它们集较高的推进效率、优良的机动性、稳定性
于一体, 不仅适合于远洋航行, 还具有低速下灵活
机动、抗扰动能力强的特点, 适应于近海等复杂环
境
[2]
. 通过鱼类游动观测实验, 分析了长鳍不仅具有
波频、波长、波幅等要素可调的运动特征, 而且具有
非等高鳍条、弯曲基线、鳍条与基线呈非垂直关系
的形态特征
[4,5]
. 仿生波动长鳍研究起步较晚, 现有
运动学模型大都借鉴Lighthill的尾摆鱼类二维波动
方程. 比如, MacIver
[6]
对尾摆方程进行适当扩充, 提
出了基于俯视面正弦曲线簇的运动学模型. Xie
[7]
提
出了多坐标系转换的运动学模型, 仅能对理想的仿
鱼波动面进行运动描述. 总的说来, 鱼类波动长鳍运
动描述模型数目有限, 很难综合描述生物观测实验
收稿日期: 2007−09−23; 收修改稿日期: 2008−03−27.
基金项目: 国防基础科研项目; 国家自然科学基金资助项目(50405006).
剩余6页未读,继续阅读
资源评论


6???6
- 粉丝: 3
- 资源: 931









最新资源
- 基于Vue、TypeScript、CSS、JavaScript、HTML的century_restaurant点餐小程序设计源码
- 基于JavaScript、Java的餐饮管理系统MBG设计源码
- 基于Go语言的华东师范大学图书馆抢座程序设计源码
- 基于JavaScript的一体机低配页面HTML+CSS+PHP设计源码
- 基于Java语言的zsxy-openapi-sdk设计源码示例
- 基于Python的mmdetection同步更新设计源码
- 基于Vue的iOC-Plat平台设计源码
- 基于TCP协议与ESP32驱动的TFT彩屏无线投屏助手设计源码
- 基于wex5的SpringBoot后端替换BAAS服务设计源码
- 基于Objective-C语言开发的仿滴滴、膜拜等软件首页弹窗广告设计源码
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


