基于ARM的多自由度机械手设计
116 浏览量
2020-10-16
18:27:23
上传
评论
收藏 320KB PDF 举报

基于基于ARM的多自由度机械手设计的多自由度机械手设计
机械手选用ARM芯片作为控制核心,主要是基于其运算能力强,外设接口丰富,可扩展成串行、并行、高速和
低速等各种接口,也能很容易扩展成网络接口,便于机械手组网协同工作。特别是ARM芯片的LCD接口和存储
器扩展接口能大大提高机械手的智能化程度,扩展LCD后能提供友好的人机交互界面,便于编程、维护和故障
指示;大容量存储器可为复杂运算和大数据存储提供方便。ARM的这些优点为机械手的高度智能化提供了最有
效的保证。
孙捷,刘瑄,有力,刘楚,徐莲辉
(华中师范大学 计算机学院,湖北 武汉 430070)
摘要:摘要:
关键词:关键词:机械手;ARM芯片;
0引言引言
机器人应用情况是展现一个国家工业自动化水平的重要标志。工业自动化中机械手发挥了相当大的作用,生产中应用机械
手可以减轻劳动强度、保证产品质量、实现安全生产;尤其在高温、高压、易爆、有放射性或有毒性污染的场合中,机械手能
代替人进行正常的工作。特别是近些年人工成本越来越高,企业都迫切需要采用一些自动化设备来降低人工成本,工业机械手
在这方面有着广阔的应用前景。
常用的机械手多为6个自由度以下的。一般的专用机械手只有2~4个自由度,而通用机械手则多数为3~6个自由度。目前
大多数工业机械手基本上都是采用单片机、PLC或DSP等控制的,单片机只能控制简单的3个自由度以下的机械手;PLC控制
的成本高,运算能力很差,对机械手运动轨迹控制能力差;应用DSP控制运算能力强,但其外设接口没有ARM丰富[1],并
且成本也比ARM高,一片DSP控制的机械手自由度也有限,6个自由度的、复杂一点的机械手都需要多个DSP芯片协同才能较
好地完成控制。
1机械部分设计与安装机械部分设计与安装
1.1 4个自由度设计[个自由度设计[2]]
机械抓手选用型号为42HD2401100L,两相4线步进电机,丝杆电机的行程为100 mm,步距角为1.8°,电流1.5 A
N1504。利用其不同的行程可以设计不同力矩大小的抓手或夹具,此部分通过加工的一个连接轴,用螺丝锁定在型号为
42BYG行星减速步进电机上,配48 mm 步进电机,减速比5.18∶1,这样控制机械抓手在360°范围内旋转。也就是机械手的第
一自由度控制。
第二自由度装置负责将前面第一自由度的电机固定,并且控制运动一定的角度范围,根据选用的蜗轮减速装置结构,角度
范围为0~130°。电机为57步进电机57BYG250H,转矩2.8 NM,步距角1.8°,机身长112 mm,蜗轮蜗杆减速机NMRV030,
减速比1∶20。
第三自由度使用的电机型号为86HS4580,两相步进,步距角1.8°,机身长度78 mm,电流4 A,保持转矩4.24 NM。配备
蜗轮减速装置RV040,减速比1∶20。
第四自由度主要负责平面内360°旋转,采用与第二自由度一样的电机,减速装置的减速比为1∶30。该电机安装在底座上。
1.2电机驱动器选型及机械部分总成电机驱动器选型及机械部分总成
机械手有4个自由度和1个机械抓手,共使用了5个不同规格步进电机,其中86型号的电机使用的是F-MD860,其他的都使
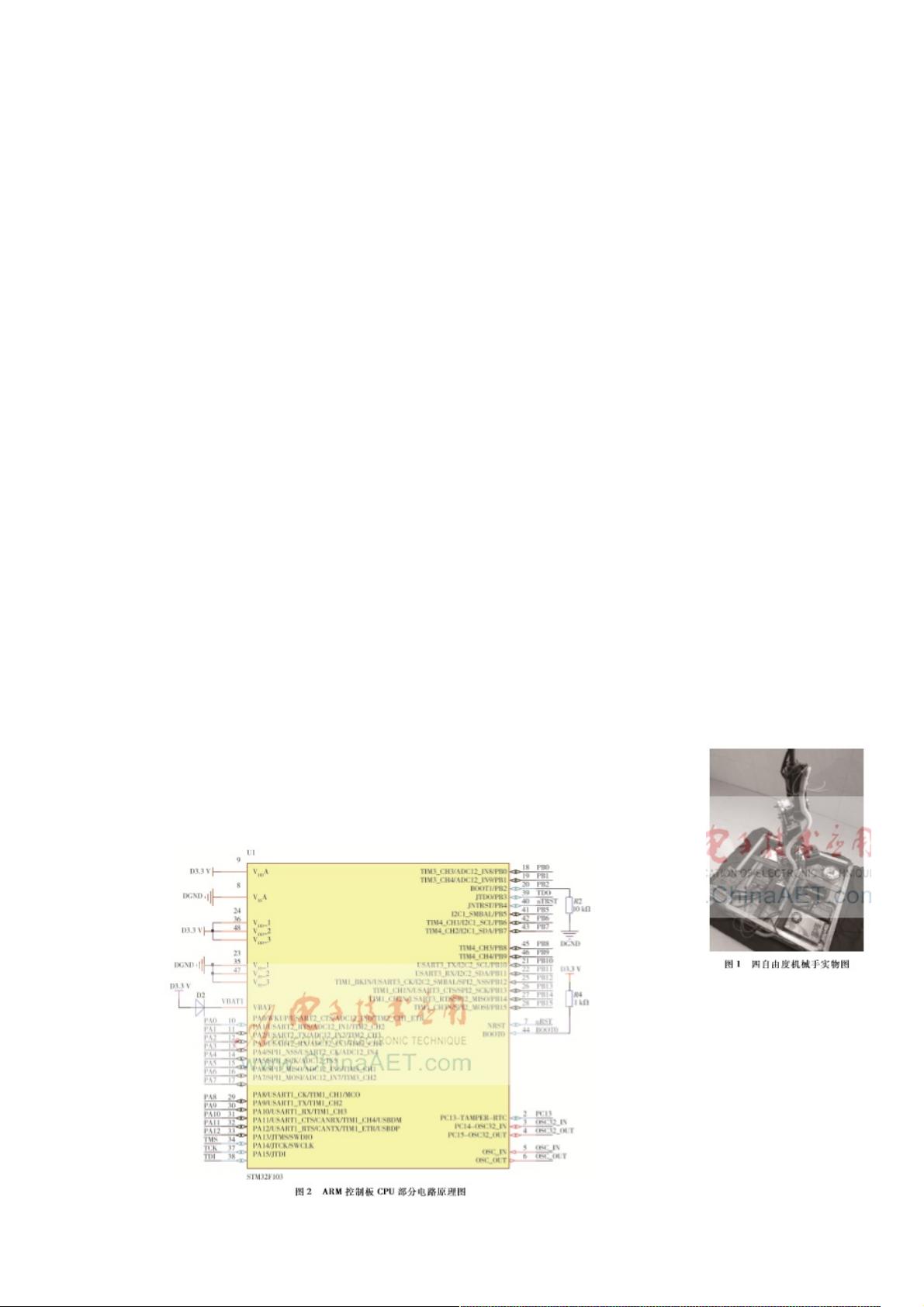
用DM542型,配备了两个24 V功率为250 W的电源分别供电[3]。 所有机械部分安装完成后的
实物图如图1所示,底座采用镀锌方管焊接成100 mm×100 mm的双层铁架构成,最下面的电机用角
铁固定,全部用自喷漆喷涂一遍用于防锈,将导线用伸缩塑胶管封固定,以防导线缠绕或损坏
[4]。
2机械手控制系统硬件设计机械手控制系统硬件设计
机械手的控制核心采用功能强大的ARM芯片来进行设计,芯片型号为STM32F103C8T6,引脚数48。控制板接收上位机
资源评论


weixin_38658982
- 粉丝: 7
- 资源: 941









最新资源
- juhua-p8YYy-v0e13a7b5(1).apk
- Neo4j资源:Neo4j.rb的性能测试相关程序
- 排序算法之堆排序算法:用C++语言实现堆排序算法
- 基于Springboot的房屋租赁系统(源代码+论文+说明文档+PPT)-计算机专业精品毕业设计和课程设计
- leidian.py
- 直接插入排序算法:C语言实现直接插入排序算法
- 基于Springboot的大学生就业招聘系统(源代码+论文+说明文档+PPT)-计算机专业精品毕业设计和课程设计
- 基于Vue的H5结婚请帖前端设计源码
- saxaxasxasx
- 基于SSM++jsp的实验室耗材管理系统(源代码+论文+说明文档+PPT)-计算机专业精品毕业设计和课程设计
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


