基于单片机的某车型CAN总线系统设计

需积分: 0 37 浏览量
更新于2020-10-23
收藏 177KB PDF 举报
简要介绍了AT90CAN 28的功能特点,讲述了AT90CAN128中CAN控制器的原理及使用方法,针对所设计车型CAN总线控制系统的构成特点,制定了通信协议,并以联合制动单元为具体实例,对其设计过程进行了详细的描述,使读者能更加深刻地体会到这款单片机的特别之处。
随着现代汽车电子技术的飞速发展,车辆内部的控制单元数量越来越多,传统的点对点布线方式已经不能满足系统的复杂性和高效性需求。因此,CAN(Controller Area Network,控制器局域网络)总线技术应运而生,它以其高性能、高可靠性及良好的抗干扰性,在汽车电子领域中得到了广泛应用。本文将详细介绍如何基于AT90CAN128单片机设计某车型的CAN总线系统,探讨其功能特点、原理及使用方法,并通过联合制动单元的设计实例,展示其在汽车电子中的应用价值。
AT90CAN128单片机是ATMEL公司推出的一款带有CAN控制器的8位高性能单片机,其RISC架构保证了其运行速度和处理能力,非常适合用作嵌入式控制。这款单片机内置了15个消息对象(MOb),支持CAN2.0A和CAN2.0B协议标准,这为车辆各控制单元之间的实时通信提供了坚实的基础。
在设计CAN总线系统时,首要任务是构建符合车辆通信需求的硬件和软件平台。本文所述的CAN总线系统,将驾驶员计算机、发动机、自动变速器、安全气囊等关键控制单元互联,以500kbps的高速CAN总线保证信息传输的速度和准确性。例如,联合制动单元作为系统中不可或缺的一部分,它接收来自驾驶员计算机的指令,并结合传感器数据执行电液控制,以实现精确的制动效果。
在硬件设计方面,以AT90CAN128为核心,配套模拟量输入输出、开关量输入输出和CAN总线收发器。其中,PCA82C250作为总线接口芯片,它具有差分传输能力,能够在恶劣的电气环境下,确保数据传输的稳定性和可靠性。
软件层面上,构建一套完善的通信协议是保障系统正常运行的核心。文章中制定了详尽的CAN消息标识符规则,采用29位扩展帧格式,包含优先级、报文类型代码、目标地址和源地址,确保了消息的正确传递和处理。在驾驶员终端与联合制动单元之间的通信过程中,不同的消息标识符用于区分查询、控制和反馈信息。此外,对命令类型和命令值的精确定义,进一步确保了信息的准确传递和执行,使得系统能够高效、准确地响应驾驶员的指令。
通过这样的设计,系统不仅实现了多节点之间的高效通信,还具备了良好的扩展性和维护性。在车辆的持续发展和技术升级中,通过软件的更新即可实现对硬件部分的升级和优化,大大降低了维护成本和升级难度。
总结来说,基于AT90CAN128单片机设计的某车型CAN总线系统,不仅满足了现代汽车电子对于实时性、安全性和可靠性的高要求,还展示了单片机在汽车控制领域的强大潜力和广泛应用前景。通过这种智能的CAN总线系统,能够有效地简化车辆的线路布局,降低成本,并提高系统的整体性能。随着技术的进一步发展,我们可以预见CAN总线技术将在未来的汽车电子领域发挥更加重要的作用。
基于单片机的某车型基于单片机的某车型CAN总线系统设计总线系统设计
简要介绍了AT90CAN 28的功能特点,讲述了AT90CAN128中CAN控制器的原理及使用方法,针对所设计车型
CAN总线控制系统的构成特点,制定了通信协议,并以联合制动单元为具体实例,对其设计过程进行了详细的
描述,使读者能更加深刻地体会到这款单片机的特别之处。
摘要摘要:简要介绍了AT90CAN 28的功能特点,讲述了AT90CAN128中CAN控制器的原理及使用方法,针对所设计
关键词关键词:AT90CAN128;单片机;CAN总线;联合制动;通讯协议
引言引言
现场总线技术
[1]
是目前自动化控制领域发展比较迅速的一门技术,其中CAN(Controller Area Network)总线
[2]
是在国际上
应用最广泛的现场总线之一。近几年随着汽车电子行业的发展,现代汽车中CAN总线已经成为必须采用的装置之一。本文以
ATMEL公司新近生产的一款内置CAN控制器的单片机——AT90CAN128为基础,设计了一款车载CAN总线系统,通过CAN智
能测控仪表对车中部分单元参数量进行实时监控,使各单元之间协调运转。另外,传输线束大大简化,可靠性得到了极大的提
高,有效节约了线束安装空间和系统成本。
1 AT90CAN128特性概述特性概述
1.1 基本特性
AT90CAN128
[3]
是基于AVR RISC结构的8位低功耗CMOS微处理器,它采用了先进的指令集以及单周期指令执行时间,其
数据吞吐率高达1 MIPS/MHz,其内核具有丰富的指令集和32个通用工作寄存器。所有寄存器都直接与ALU相连接。通过将8
位RISC CPU与系统内可编程的Flash集成在一个芯片内,为许多嵌入式控制应用提供了灵活而低成本的方案。
1.2 内置CAN控制器概述
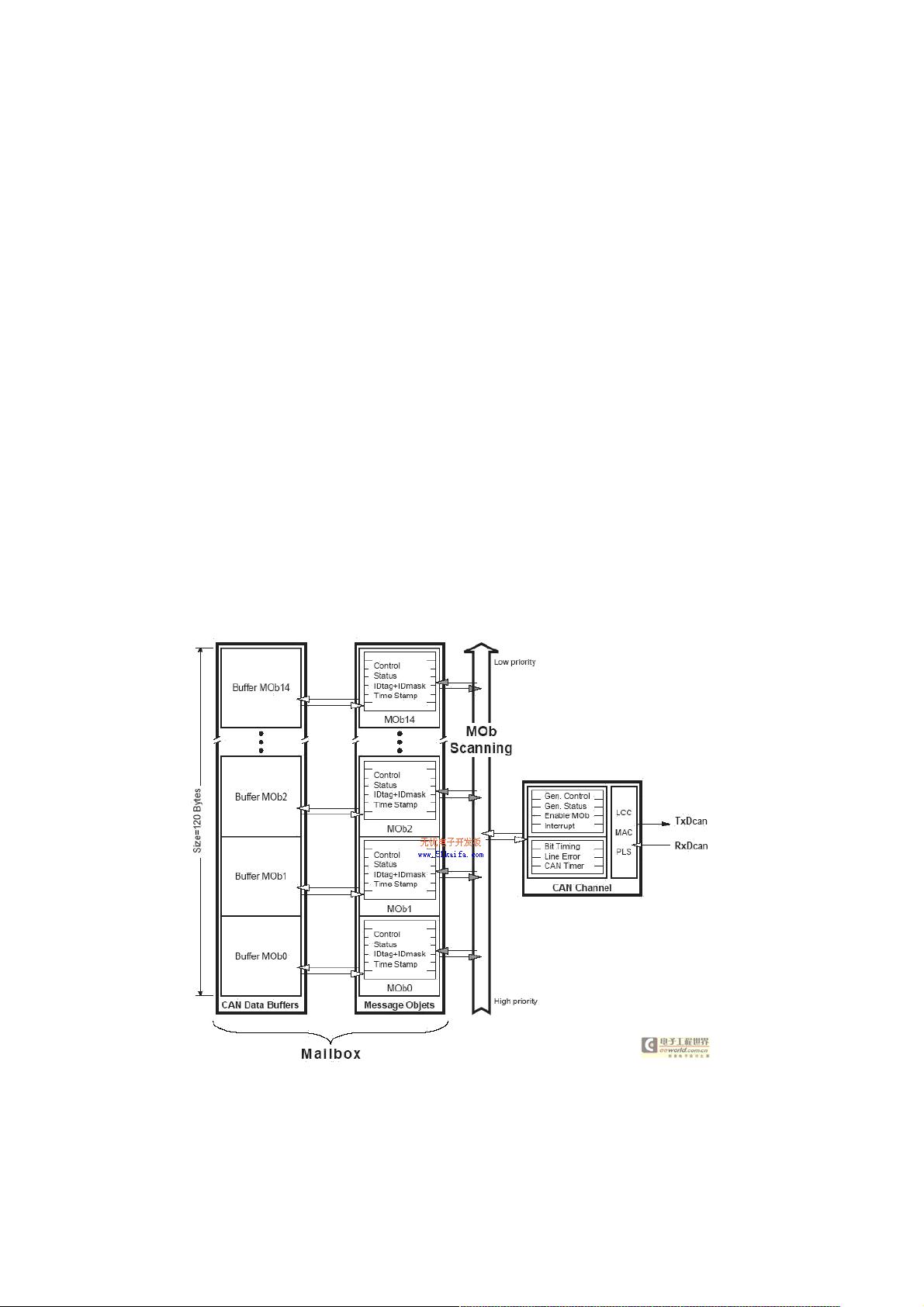
AT90CAN128内置有完全符合CAN2.0A和2.0B标准协议的CAN控制器。采用MOb(消息对象)方式进行数据的发送和接
收,共有15个MOb,它们具有相同的属性:有11位标识符(2.0A协议),也可扩展至29位(2.0B议);8位数据缓冲(静态
分配);Tx,Rx帧
缓冲或自动响应配置;时间标识。CAN控制器的结构如图1所示。
图1、CAN控制器结构
MOb是一个CAN消息帧的描述符。它包括处理一个CAN消息帧的所有信息。这意味着一个MOb可以看成一个对象,来描述
一条CAN消息。MOb的数目是从0到14。它们相互独立,但在多重比较的时候,低位的MOb会获得优先权。每个MOb都被安
置在一个页中来保存。页的序号就是MOb的序号。
2 车载车载CAN总线控制系统总线控制系统
[4]
的设计的设计
由于对实时性要求比较高,所以采用高速CAN总线,信息传输速度为500kbps,连接的主要对象有:驾驶员计算机、发动
机、自动变速器、安全气囊、仪表信号采集系统、联合制动系统等。由于各个节点作用不同,所以在硬件搭建和软件设计以及
下载后可阅读完整内容,剩余3页未读,立即下载
2020-12-06 上传
2010-06-16 上传
119 浏览量
2019-09-05 上传
2021-07-12 上传
103 浏览量
2021-05-04 上传
200 浏览量
136 浏览量
2022-12-01 上传
175 浏览量
161 浏览量
2008-03-19 上传
175 浏览量
104 浏览量
2024-05-08 上传
109 浏览量
2022-04-29 上传
2020-07-13 上传
125 浏览量
101 浏览量
2022-01-11 上传
资源评论


weixin_38625442
- 粉丝: 6
- 资源: 950









最新资源
- 【锂电池剩余寿命预测】TCN时间卷积神经网络锂电池剩余寿命预测,马里兰大学锂电池数据集(Pytorch完整源码和数据)
- stm32 USB 复合设备使用msc cdc
- 武汉、西安等城市预处理后的路网数据,包括道路双线转单线、中心打断等等
- 【锂电池剩余寿命预测】Transformer锂电池剩余寿命预测,马里兰大学锂电池数据集(Pytorch完整源码和数据)
- 汽车电机壳体压装产线sw18可编辑全套技术资料100%好用.zip
- boot-win7.c2c84adb.mp4
- redis笔记自学笔记自学笔记
- 前端分析-2023071100789
- 工创赛k210视觉识别
- 前端分析-2023071100789
- Java 21 新特性详解:虚拟线程、字符串模板与模式匹配等亮点
- Photoshop-CS6-13.0.1-简化版
- 通过网盘分享的文件:中国国家级地面气象站基本气象要素日值数据集(V3.0)SURF-CLI-CHN-MUL-DAY-V3.0.zip
- AI游戏Flappy-Bird
- Java各版本新特性一览表,汇总Java 8~21的新特性,按功能分类速查
- 大模型与智能制造融合创新报告,涵盖智能制造背景、大模型技术赋能、工艺优化、智能研发、生产调度、供应链优化、数据安全等内容,助力制造业降本增效、智能化升级与高效决策,适用于行业报告撰写与企业战略规划
