

QUANTIZED H
∞
CONTROL FOR NETWORKED SYSTEMS WITH
COMMUNICATION CONSTRAINTS
Huaicheng Yan, Hongbo Shi, Hao Zhang, and Fuwen Yang
ABSTRACT
The problem of quantized H
∞
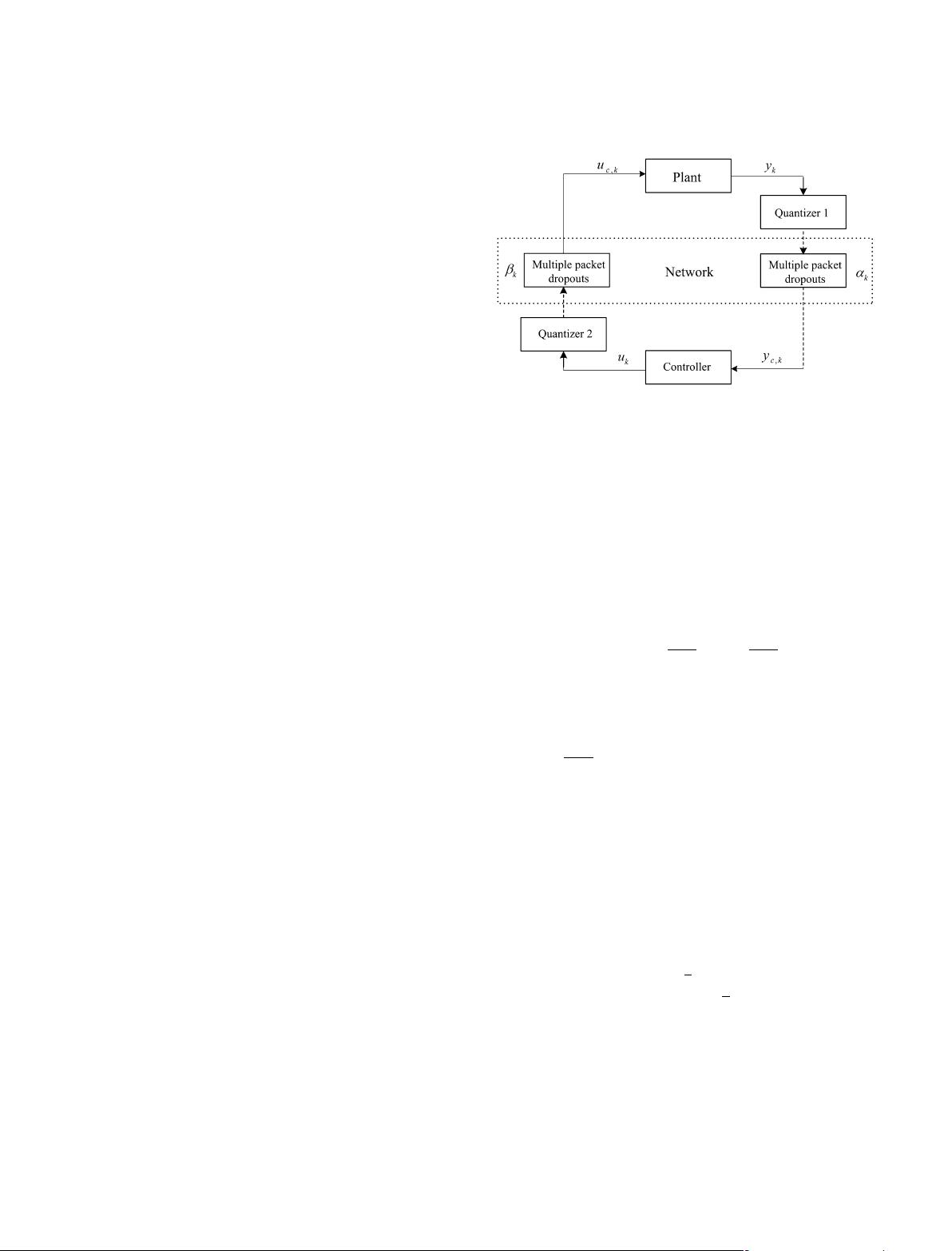
control for networked control systems (NCSs) subject to time-varying delay and multiple
packet dropouts is investigated in this paper. Both the control input and the measurement output signals are quantized before being
transmitted and the quantized errors are described as sector bound uncertainties. The measurement channel and the control
channel packet dropouts are considered simultaneously, and the stochastic variables satisfying Bernoulli random binar y distri-
bution are utilized to model the random multiple packet dropouts. Sufficient conditions for the existence of an observer-based
controller are established to ensure the exponential mean-square stablility of the closed-loop system and achieve the optimal H
∞
disturbance attenuation level. By using a globally convergent algorithm involving convex optimization, the nonconvex feasibility
can be solved successfully. Finally, a numerical example is given to illustrate the effectiveness and applicability of the proposed
method.
Key Words: H
∞
control, networked control system, quantization, time-varying delay, multiple packet dropouts.
I. INTRODUCTION
Over the past few years, a great number of researchers
have put their attention into NCSs. As is well known, in
modern industrial control systems, the common connection
of sensors, controllers and actuators through a network
medium has many advantages over the traditional point-to-
point control, such as low cost, reduced weight and power
requirements, simple installation and maintenance [1].
However, some new problems have emerged from the inser-
tion of a network in to the control system due to the limited
communication capacity. Network-induced delays and packet
dropouts are the two most important issues that should be
considered in NCSs, where different equipment is linked
through a public network. Since communication channels
typically have limited bandwidth or bit rates, the communi-
cation signals should be quantized before they are transmitted
to the next nodes in order to save bandwidth [2–4,13–19].
There are two types of quantizers that have been studied for
NCSs. The first type are memoryless quantizers, which are
also the so-called static quantizers. In recent years, many
researchers have focused their attention on this topic [13–16].
By using a sector bound approach, the quantizer is assumed
to be logarithmic and static. A major advantage of logarithmic
quantizer is that quantization error can be handled easily, and
robust control methods can be used successfully to deal with
the quantized control systems. The second type are dynamic
quantizers [17,18], which have the main advantage of requir-
ing a finite number of quantization levels.
On the other hand, it is well known that in many control
systems, such as manufacturing systems and telecommunica-
tions, time delays always exist and are often a major cause of
the instability and poor performance of a system. Therefore,
a great number of researchers have been attracted by the
stability of time-delay system, see [5–9,20,24] and the refer-
ences therein.
In recent years, the problem of NCSs with data packet
dropouts has also been a hot research topic [10–12,22–23].
The Bernoulli distributed white sequences method is used in
[10,11], and the behavior history of packet dropouts is
described by Markov chains in [12]. However, most of the
existing results are based on single packet dropout, while the
data packet dropouts are random by nature due to network
congestion. There may exist more than one consecutive
packet dropout. Due to the complicated nature of the system
modeling and analysis, only a few works have considered
both the sensor-to-controller and controller-to-actuator
packet dropouts simultaneously [2–4]. Quantized H
∞
control
for discrete-time NCSs with time-varying delay has not been
Manuscript received August 29, 2012; revised January 26, 2013; accepted May 12,
2013.
Huaicheng Yan (corresponding author, e-mail: hcyan@ecust.edu.cn), Hongbo Shi
(e-mail: hbshi@ecust.edu.cn), and FuwenYang are with Key Laboratory of Advanced
Control and Optimization for Chemical Processes of Ministry of Education and also
are with School of Information Science and Engineering, East China University of
Science and Technology, Shanghai 200237, China.
Hao Zhang is with Department of Control Science and Engineering, Tongji Uni-
versity, Shanghai, 200092, China, and is also with Department of Mechanical and
Biomedical Engineering, City University of Hong Kong, Kowloon, Hong Kong.
This work is supported by National Natural Science Foundation of China
(61004028, 61272064, 61273026, 61174064), Fundamental Research Funds for
Central Universities, Xiangjiang Project (XJ2011023), Innovation Program of Shang-
hai Municipal Education Commission (12zz052), and China Postdoctoral Science
Foundation funded project (2012M520048).
Copyright (c) 2008 IEEE.
Asian Journal of Control, Vol. 15, No. 5, pp. 1468–1476, September 2013
Published online 11 July 2013 in Wiley Online Library (wileyonlinelibrary.com) DOI: 10.1002/asjc.762
© 2013 John Wiley and Sons Asia Pte Ltd and Chinese Automatic Control Society
剩余8页未读,继续阅读
资源评论


weixin_38606076
- 粉丝: 4
- 资源: 942









最新资源
- 多线框物体架子检测28-YOLO(v5至v11)、COCO、CreateML、Paligemma、VOC数据集合集.rar
- Python快速排序算法详解及优化策略
- 政务大数据资源平台设计方案
- 完结17章SpringBoot3+Vue3 开发高并发秒杀抢购系统
- 基于MATLAB的信号处理与频谱分析系统
- 人大金仓(KingBase)备份还原文档
- SecureCRT.9.5.1.3272.v2.CN.zip
- CHM助手:制作CHM联机帮助的插件使用手册
- 大数据硬核技能进阶 Spark3实战智能物业运营系统完结26章
- Python个人财务管理系统(Personal Finance Management System)
- 多边形框架物体检测18-YOLO(v5至v11)、COCO、CreateML、TFRecord、VOC数据集合集.rar
- 虚拟串口VSPXD软件(支持64Bit)
- 机器学习金融反欺诈项目数据
- GAMMA软件新用户手册中文版
- CIFAR-10 64*64训练测试数据集
- cd35f259ee4bbfe81357c1aa7f4434e6.mp3
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


